
適用於初學者的DIY RepRap 3D 印表機課程—第3部分:代碼

如果您是初次接觸該項目,請先參考該專案第1部分和第2部分的內容再進行下一步的工作: 適用於初學者的DIY RepRap 3D 印表機課程 – 第1部分:構建以及 適用於初學者的DIY RepRap 3D 印表機課程 – 第2部分: 接線。
在DIY RepRap 3D印表機系列的最後一部分中,我們將配置皮帶和擋塊,添加LCD顯示幕,並編寫程式碼對印表機進行測試。讓我們開始吧!
最終印表機規格:
桌上型電腦占地面積:11in x 13in x 13in
最大建造空間: 105mm x 130mm x 80mm
硬體:
- 從第1部分中得到的3D印表機框架
- Arduino Mega
- Ramps 1.4
- 任意大小的SD卡
- 5 x A4988 帶有散熱器的步進馬達驅動器
- 6 x 機械端子擋塊
- 20 x 公對母線
- Discount RepRap的智慧全屏佈局顯示器
- 電源(12V 30A, OEM)
- 三芯電纜和連接器(見圖 X)
- 6 x ¼”環形壓接連接器
- 大規格導線
- 邏輯線
- 電工膠帶
- 膠帶,魔術貼,或其他電纜管理解決方案。
軟體
- Arduino IDE
- Marlin 3D 印表機固件
- Cura 3D 列印切片軟體
工具
- 烙鐵
- 焊料
- 剝線鉗
- 壓接器
概覽
- 連接皮帶裝置
- 連接機械擋塊
- 測試所有組件
- 連接螢幕
- 下載並配置Marlin固件
- 收尾工作
- 您的第一台印表機
步驟1:連接皮帶裝置
本課程中的皮帶配置如圖1所示。您可能會對配置中的一些地方感到不解,我將會對其意圖進行說明。

圖1:皮帶配置
該系統使用了兩條皮帶,每條皮帶環繞一個步進馬達,然後連接到擠出機滑標的對角線上。也就是說,當僅運行一個步進馬達時,皮帶將會沿對角線運動。如果兩個馬達都沿相同方向旋轉,則擠出機沿x軸行動;如果它們沿相反方向旋轉,則擠出機沿y軸行動。這使得印表機可以沿對角線快速運動,從而節省了列印的時間和功耗。
為了設定此裝置,將同步帶切至2 x 140 cm長。這完全取決於印表機的尺寸,因此請先設定好皮帶,再按照尺寸進行裁切。從一側開始,將一條皮帶夾在擠出機滑標的一角。最終結果應如下圖所示(圖2)。

圖2:僅連接了一根皮帶的印表機
以下是安裝技巧:
- 將平滑側纏繞在堆疊的底部同步皮帶輪上。
- 將皮帶的齒側纏繞在步進馬達上的同步皮帶輪上。
- 將皮帶的齒側纏繞在緊挨著的兩個角處的底部軸承上。
- 將齒側纏繞在底部同步皮帶輪上,並將其夾緊在反對角線上。
- 使用頂部同步皮帶輪和軸承在另一個步進馬達上重複上述步驟。
步驟2:測試所有組件
在繼續進行該項目之前,我們將對所有元件分別進行測試,確認能否正常工作。請確認已下載Arduino IDE。將以下代碼複製並粘貼到Arduino環境中。
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254 255 256 257 258 259 260 261 262 263 264 265 266 267 268 269 270 271 272 273 274 275 276 277 278 279 280 281 282 283 284 285 286 287 288 289 290 291 292 293 294 295 296 297 298 299 300 301 302 303 304 305 306 307 308 309 310 311 312 313 314 315 316 317 318 319 320 321 322 323 324 325 326 327 328 329 330 331 332 333 334 335 336 337 338 339 340 341 342 343 344 345 346 347 348 349 350 351 352 353 354 355 356 357 358 359 360 361 362 363 364 365 366 367 368 369 370 371 372 373 374 375 376 377 378 379 380 381 382 383 384 385 386 387 388 389 390 391 392 393 394 395 396 397 398 399 400 401 402 403 404 405 406 407 408 409 410 411 412 413 414 415 416 417 418 419 420 421 422 423 424 425 426 427 428 429 430 431 432 433 434 435 436 437 438 439 440 441 442 443 444 445 446 447 448 449 450 451 452 453 454 455 456 457 458 459 460 461 462 463 464 465 466 467 468 469 470 471 472 473 474 475 476 477 478 479 480 481 482 483 484 485 486 487 488 489 490 491 492 493 494 495 496 497 498 499 500 501 502 503 504 505 506 507 508 509 510 511 512 513 514 515 516 517 518 519 520 521 522 523 524 525 526 527 528 529 530 531 532 533 534 535 536 537 538 539 540 541 542 543 544 545 546 547 548 549 550 551 552 553 554 555 556 557 558 559 560 561 562 563 564 565 566 567 568 569 570 571 572 573 574 575 576 577 578 579 580 581 582 583 584 585 586 587 588 589 590 591 592 593 594 595 596 597 598 599 600 601 602 603 604 605 606 607 608 609 610 611 612 613 614 615 616 617 618 619 620 621 622 623 624 625 626 627 628 629 630 631 632 633 634 635 636 637 638 639 640 641 642 643 644 645 646 647 648 649 650 651 652 653 654 655 656 657 658 659 660 661 662 663 664 665 666 667 668 669 670 671 672 673 674 675 676 677 678 679 680 681 682 683 684 685 686 687 688 689 690 691 692 693 694 695 696 697 698 699 700 701 702 703 704 705 706 707 708 709 710 711 712 713 714 715 716 717 718 719 720 721 722 723 724 725 726 727 728 729 730 731 732 733 734 735 736 737 738 739 740 741 742 743 744 745 746 747 748 749 750 751 752 753 754 755 756 757 758 759 760 761 762 763 764 765 766 767 768 769 770 771 772 773 774 775 776 777 778 779 780 781 782 783 784 785 786 787 788 789 790 791 792 793 794 795 796 797 798 799 800 801 802 803 804 805 806 807 808 809 810 811 812 813 814 815 816 817 818 819 820 821 822 823 824 825 826 827 828 829 830 831 832 833 834 835 836 837 838 839 840 841 842 843 844 845 846 847 848 849 850 851 852 853 854 855 856 857 858 859 860 861 862 863 864 865 866 867 868 869 870 871 872 873 874 875 876 877 878 879 880 881 882 883 884 885 886 887 888 889 890 891 892 893 894 895 896 897 898 899 900 901 902 903 904 905 906 907 908 909 910 911 912 913 914 915 916 917 918 919 920 921 922 923 924 925 926 927 928 929 930 931 932 933 934 935 936 937 938 939 940 941 942 943 944 945 946 947 948 949 950 951 952 953 954 955 956 957 958 959 960 961 962 963 964 965 966 967 968 969 970 971 972 973 974 975 976 977 978 979 980 981 982 983 984 985 986 987 988 989 990 991 992 993 994 995 996 997 998 999 1000 1001 1002 1003 1004 1005 1006 1007 1008 1009 1010 1011 1012 1013 1014 1015 1016 1017 1018 1019 1020 1021 1022 1023 1024 1025 1026 1027 1028 1029 1030 1031 1032 1033 1034 1035 1036 1037 1038 1039 1040 1041 1042 1043 1044 1045 1046 1047 1048 1049 1050 1051 1052 1053 1054 1055 1056 1057 1058 1059 1060 1061 1062 1063 1064 1065 1066 1067 1068 |
#define X_STEP_PIN 54 #define X_DIR_PIN 55 #define X_ENABLE_PIN 38 #define X_MIN_PIN 3 #define X_MAX_PIN 2 #define Y_STEP_PIN 60 #define Y_DIR_PIN 61 #define Y_ENABLE_PIN 56 #define Y_MIN_PIN 14 #define Y_MAX_PIN 15 #define Z_STEP_PIN 46 #define Z_DIR_PIN 48 #define Z_ENABLE_PIN 62 #define Z_MIN_PIN 18 #define Z_MAX_PIN 19 #define E_STEP_PIN 26 #define E_DIR_PIN 28 #define E_ENABLE_PIN 24 #define Q_STEP_PIN 36 #define Q_DIR_PIN 34 #define Q_ENABLE_PIN 30 #define SDPOWER -1 #define SDSS 53 #define LED_PIN 13 #define FAN_PIN 9 #define PS_ON_PIN 12 #define KILL_PIN -1 #define HEATER_0_PIN 10 #define HEATER_1_PIN 8 #define TEMP_0_PIN 13 // ANALOG NUMBERING #define TEMP_1_PIN 14 // ANALOG NUMBERING void setup() { pinMode(FAN_PIN , OUTPUT); pinMode(HEATER_0_PIN , OUTPUT); pinMode(HEATER_1_PIN , OUTPUT); pinMode(LED_PIN , OUTPUT); pinMode(X_STEP_PIN , OUTPUT); pinMode(X_DIR_PIN , OUTPUT); pinMode(X_ENABLE_PIN , OUTPUT); pinMode(Y_STEP_PIN , OUTPUT); pinMode(Y_DIR_PIN , OUTPUT); pinMode(Y_ENABLE_PIN , OUTPUT); pinMode(Z_STEP_PIN , OUTPUT); pinMode(Z_DIR_PIN , OUTPUT); pinMode(Z_ENABLE_PIN , OUTPUT); pinMode(E_STEP_PIN , OUTPUT); pinMode(E_DIR_PIN , OUTPUT); pinMode(E_ENABLE_PIN , OUTPUT); pinMode(Q_STEP_PIN , OUTPUT); pinMode(Q_DIR_PIN , OUTPUT); pinMode(Q_ENABLE_PIN , OUTPUT); digitalWrite(X_ENABLE_PIN , LOW); digitalWrite(Y_ENABLE_PIN , LOW); digitalWrite(Z_ENABLE_PIN , LOW); digitalWrite(E_ENABLE_PIN , LOW); digitalWrite(Q_ENABLE_PIN , LOW); } void loop () { if (millis() %1000 <500) digitalWrite(LED_PIN, HIGH); else digitalWrite(LED_PIN, LOW); if (millis() %1000 <300) { digitalWrite(HEATER_0_PIN, HIGH); digitalWrite(HEATER_1_PIN, LOW); digitalWrite(FAN_PIN, LOW); } else if (millis() %1000 <600) { digitalWrite(HEATER_0_PIN, LOW); digitalWrite(HEATER_1_PIN, HIGH); digitalWrite(FAN_PIN, LOW); } else { digitalWrite(HEATER_0_PIN, LOW); digitalWrite(HEATER_1_PIN, LOW); digitalWrite(FAN_PIN, HIGH); } if (millis() %10000 <5000) { digitalWrite(X_DIR_PIN , HIGH); digitalWrite(Y_DIR_PIN , HIGH); digitalWrite(Z_DIR_PIN , HIGH); digitalWrite(E_DIR_PIN , HIGH); digitalWrite(Q_DIR_PIN , HIGH); } else { digitalWrite(X_DIR_PIN , LOW); digitalWrite(Y_DIR_PIN , LOW); digitalWrite(Z_DIR_PIN , LOW); digitalWrite(E_DIR_PIN , LOW); digitalWrite(Q_DIR_PIN , LOW); } digitalWrite(X_STEP_PIN , HIGH); digitalWrite(Y_STEP_PIN , HIGH); digitalWrite(Z_STEP_PIN , HIGH); digitalWrite(E_STEP_PIN , HIGH); digitalWrite(Q_STEP_PIN , HIGH); delay(1); digitalWrite(X_STEP_PIN , LOW); digitalWrite(Y_STEP_PIN , LOW); digitalWrite(Z_STEP_PIN , LOW); digitalWrite(E_STEP_PIN , LOW); digitalWrite(Q_STEP_PIN , LOW); } This code should activate all the steppers, fans, and heaters. The only problem with this code is that it does not activate both z-axis steppers; it only activates one. If you encounter any problems with any of the components, try isolating them and only running them in the code. If you would like to test the z-axis and thermistor, download the following codes: <thermistortables.h> #ifndef THERMISTORTABLES_H_ #define THERMISTORTABLES_H_ #define OVERSAMPLENR 16 #if (THERMISTORHEATER_0 == 1) || (THERMISTORHEATER_1 == 1) || (THERMISTORHEATER_2 == 1) || (THERMISTORBED == 1) //100k bed thermistor const short temptable_1[][2] PROGMEM = { { 23*OVERSAMPLENR , 300 }, { 25*OVERSAMPLENR , 295 }, { 27*OVERSAMPLENR , 290 }, { 28*OVERSAMPLENR , 285 }, { 31*OVERSAMPLENR , 280 }, { 33*OVERSAMPLENR , 275 }, { 35*OVERSAMPLENR , 270 }, { 38*OVERSAMPLENR , 265 }, { 41*OVERSAMPLENR , 260 }, { 44*OVERSAMPLENR , 255 }, { 48*OVERSAMPLENR , 250 }, { 52*OVERSAMPLENR , 245 }, { 56*OVERSAMPLENR , 240 }, { 61*OVERSAMPLENR , 235 }, { 66*OVERSAMPLENR , 230 }, { 71*OVERSAMPLENR , 225 }, { 78*OVERSAMPLENR , 220 }, { 84*OVERSAMPLENR , 215 }, { 92*OVERSAMPLENR , 210 }, { 100*OVERSAMPLENR , 205 }, { 109*OVERSAMPLENR , 200 }, { 120*OVERSAMPLENR , 195 }, { 131*OVERSAMPLENR , 190 }, { 143*OVERSAMPLENR , 185 }, { 156*OVERSAMPLENR , 180 }, { 171*OVERSAMPLENR , 175 }, { 187*OVERSAMPLENR , 170 }, { 205*OVERSAMPLENR , 165 }, { 224*OVERSAMPLENR , 160 }, { 245*OVERSAMPLENR , 155 }, { 268*OVERSAMPLENR , 150 }, { 293*OVERSAMPLENR , 145 }, { 320*OVERSAMPLENR , 140 }, { 348*OVERSAMPLENR , 135 }, { 379*OVERSAMPLENR , 130 }, { 411*OVERSAMPLENR , 125 }, { 445*OVERSAMPLENR , 120 }, { 480*OVERSAMPLENR , 115 }, { 516*OVERSAMPLENR , 110 }, { 553*OVERSAMPLENR , 105 }, { 591*OVERSAMPLENR , 100 }, { 628*OVERSAMPLENR , 95 }, { 665*OVERSAMPLENR , 90 }, { 702*OVERSAMPLENR , 85 }, { 737*OVERSAMPLENR , 80 }, { 770*OVERSAMPLENR , 75 }, { 801*OVERSAMPLENR , 70 }, { 830*OVERSAMPLENR , 65 }, { 857*OVERSAMPLENR , 60 }, { 881*OVERSAMPLENR , 55 }, { 903*OVERSAMPLENR , 50 }, { 922*OVERSAMPLENR , 45 }, { 939*OVERSAMPLENR , 40 }, { 954*OVERSAMPLENR , 35 }, { 966*OVERSAMPLENR , 30 }, { 977*OVERSAMPLENR , 25 }, { 985*OVERSAMPLENR , 20 }, { 993*OVERSAMPLENR , 15 }, { 999*OVERSAMPLENR , 10 }, { 1004*OVERSAMPLENR , 5 }, { 1008*OVERSAMPLENR , 0 } //safety }; #endif #if (THERMISTORHEATER_0 == 2) || (THERMISTORHEATER_1 == 2) || (THERMISTORHEATER_2 == 2) || (THERMISTORBED == 2) //200k bed thermistor const short temptable_2[][2] PROGMEM = { {1*OVERSAMPLENR, 848}, {54*OVERSAMPLENR, 275}, {107*OVERSAMPLENR, 228}, {160*OVERSAMPLENR, 202}, {213*OVERSAMPLENR, 185}, {266*OVERSAMPLENR, 171}, {319*OVERSAMPLENR, 160}, {372*OVERSAMPLENR, 150}, {425*OVERSAMPLENR, 141}, {478*OVERSAMPLENR, 133}, {531*OVERSAMPLENR, 125}, {584*OVERSAMPLENR, 118}, {637*OVERSAMPLENR, 110}, {690*OVERSAMPLENR, 103}, {743*OVERSAMPLENR, 95}, {796*OVERSAMPLENR, 86}, {849*OVERSAMPLENR, 77}, {902*OVERSAMPLENR, 65}, {955*OVERSAMPLENR, 49}, {1008*OVERSAMPLENR, 17}, {1020*OVERSAMPLENR, 0} //safety }; #endif #if (THERMISTORHEATER_0 == 3) || (THERMISTORHEATER_1 == 3) || (THERMISTORHEATER_2 == 3) || (THERMISTORBED == 3) //mendel-parts const short temptable_3[][2] PROGMEM = { {1*OVERSAMPLENR,864}, {21*OVERSAMPLENR,300}, {25*OVERSAMPLENR,290}, {29*OVERSAMPLENR,280}, {33*OVERSAMPLENR,270}, {39*OVERSAMPLENR,260}, {46*OVERSAMPLENR,250}, {54*OVERSAMPLENR,240}, {64*OVERSAMPLENR,230}, {75*OVERSAMPLENR,220}, {90*OVERSAMPLENR,210}, {107*OVERSAMPLENR,200}, {128*OVERSAMPLENR,190}, {154*OVERSAMPLENR,180}, {184*OVERSAMPLENR,170}, {221*OVERSAMPLENR,160}, {265*OVERSAMPLENR,150}, {316*OVERSAMPLENR,140}, {375*OVERSAMPLENR,130}, {441*OVERSAMPLENR,120}, {513*OVERSAMPLENR,110}, {588*OVERSAMPLENR,100}, {734*OVERSAMPLENR,80}, {856*OVERSAMPLENR,60}, {938*OVERSAMPLENR,40}, {986*OVERSAMPLENR,20}, {1008*OVERSAMPLENR,0}, {1018*OVERSAMPLENR,-20} }; #endif #if (THERMISTORHEATER_0 == 4) || (THERMISTORHEATER_1 == 4) || (THERMISTORHEATER_2 == 4) || (THERMISTORBED == 4) //10k thermistor const short temptable_4[][2] PROGMEM = { {1*OVERSAMPLENR, 430}, {54*OVERSAMPLENR, 137}, {107*OVERSAMPLENR, 107}, {160*OVERSAMPLENR, 91}, {213*OVERSAMPLENR, 80}, {266*OVERSAMPLENR, 71}, {319*OVERSAMPLENR, 64}, {372*OVERSAMPLENR, 57}, {425*OVERSAMPLENR, 51}, {478*OVERSAMPLENR, 46}, {531*OVERSAMPLENR, 41}, {584*OVERSAMPLENR, 35}, {637*OVERSAMPLENR, 30}, {690*OVERSAMPLENR, 25}, {743*OVERSAMPLENR, 20}, {796*OVERSAMPLENR, 14}, {849*OVERSAMPLENR, 7}, {902*OVERSAMPLENR, 0}, {955*OVERSAMPLENR, -11}, {1008*OVERSAMPLENR, -35} }; #endif #if (THERMISTORHEATER_0 == 5) || (THERMISTORHEATER_1 == 5) || (THERMISTORHEATER_2 == 5) || (THERMISTORBED == 5) //100k ParCan thermistor (104GT-2) const short temptable_5[][2] PROGMEM = { {1*OVERSAMPLENR, 713}, {18*OVERSAMPLENR, 316}, {35*OVERSAMPLENR, 266}, {52*OVERSAMPLENR, 239}, {69*OVERSAMPLENR, 221}, {86*OVERSAMPLENR, 208}, {103*OVERSAMPLENR, 197}, {120*OVERSAMPLENR, 188}, {137*OVERSAMPLENR, 181}, {154*OVERSAMPLENR, 174}, {171*OVERSAMPLENR, 169}, {188*OVERSAMPLENR, 163}, {205*OVERSAMPLENR, 159}, {222*OVERSAMPLENR, 154}, {239*OVERSAMPLENR, 150}, {256*OVERSAMPLENR, 147}, {273*OVERSAMPLENR, 143}, {290*OVERSAMPLENR, 140}, {307*OVERSAMPLENR, 136}, {324*OVERSAMPLENR, 133}, {341*OVERSAMPLENR, 130}, {358*OVERSAMPLENR, 128}, {375*OVERSAMPLENR, 125}, {392*OVERSAMPLENR, 122}, {409*OVERSAMPLENR, 120}, {426*OVERSAMPLENR, 117}, {443*OVERSAMPLENR, 115}, {460*OVERSAMPLENR, 112}, {477*OVERSAMPLENR, 110}, {494*OVERSAMPLENR, 108}, {511*OVERSAMPLENR, 106}, {528*OVERSAMPLENR, 103}, {545*OVERSAMPLENR, 101}, {562*OVERSAMPLENR, 99}, {579*OVERSAMPLENR, 97}, {596*OVERSAMPLENR, 95}, {613*OVERSAMPLENR, 92}, {630*OVERSAMPLENR, 90}, {647*OVERSAMPLENR, 88}, {664*OVERSAMPLENR, 86}, {681*OVERSAMPLENR, 84}, {698*OVERSAMPLENR, 81}, {715*OVERSAMPLENR, 79}, {732*OVERSAMPLENR, 77}, {749*OVERSAMPLENR, 75}, {766*OVERSAMPLENR, 72}, {783*OVERSAMPLENR, 70}, {800*OVERSAMPLENR, 67}, {817*OVERSAMPLENR, 64}, {834*OVERSAMPLENR, 61}, {851*OVERSAMPLENR, 58}, {868*OVERSAMPLENR, 55}, {885*OVERSAMPLENR, 52}, {902*OVERSAMPLENR, 48}, {919*OVERSAMPLENR, 44}, {936*OVERSAMPLENR, 40}, {953*OVERSAMPLENR, 34}, {970*OVERSAMPLENR, 28}, {987*OVERSAMPLENR, 20}, {1004*OVERSAMPLENR, 8}, {1021*OVERSAMPLENR, 0} }; #endif #if (THERMISTORHEATER_0 == 6) || (THERMISTORHEATER_1 == 6) || (THERMISTORHEATER_2 == 6) || (THERMISTORBED == 6) // 100k Epcos thermistor const short temptable_6[][2] PROGMEM = { {28*OVERSAMPLENR, 250}, {31*OVERSAMPLENR, 245}, {35*OVERSAMPLENR, 240}, {39*OVERSAMPLENR, 235}, {42*OVERSAMPLENR, 230}, {44*OVERSAMPLENR, 225}, {49*OVERSAMPLENR, 220}, {53*OVERSAMPLENR, 215}, {62*OVERSAMPLENR, 210}, {73*OVERSAMPLENR, 205}, {72*OVERSAMPLENR, 200}, {94*OVERSAMPLENR, 190}, {102*OVERSAMPLENR, 185}, {116*OVERSAMPLENR, 170}, {143*OVERSAMPLENR, 160}, {183*OVERSAMPLENR, 150}, {223*OVERSAMPLENR, 140}, {270*OVERSAMPLENR, 130}, {318*OVERSAMPLENR, 120}, {383*OVERSAMPLENR, 110}, {413*OVERSAMPLENR, 105}, {439*OVERSAMPLENR, 100}, {484*OVERSAMPLENR, 95}, {513*OVERSAMPLENR, 90}, {607*OVERSAMPLENR, 80}, {664*OVERSAMPLENR, 70}, {781*OVERSAMPLENR, 60}, {810*OVERSAMPLENR, 55}, {849*OVERSAMPLENR, 50}, {914*OVERSAMPLENR, 45}, {914*OVERSAMPLENR, 40}, {935*OVERSAMPLENR, 35}, {954*OVERSAMPLENR, 30}, {970*OVERSAMPLENR, 25}, {978*OVERSAMPLENR, 22}, {1008*OVERSAMPLENR, 3} }; #endif #if (THERMISTORHEATER_0 == 7) || (THERMISTORHEATER_1 == 7) || (THERMISTORHEATER_2 == 7) || (THERMISTORBED == 7) // 100k Honeywell 135-104LAG-J01 const short temptable_7[][2] PROGMEM = { {46*OVERSAMPLENR, 270}, {50*OVERSAMPLENR, 265}, {54*OVERSAMPLENR, 260}, {58*OVERSAMPLENR, 255}, {62*OVERSAMPLENR, 250}, {67*OVERSAMPLENR, 245}, {72*OVERSAMPLENR, 240}, {79*OVERSAMPLENR, 235}, {85*OVERSAMPLENR, 230}, {91*OVERSAMPLENR, 225}, {99*OVERSAMPLENR, 220}, {107*OVERSAMPLENR, 215}, {116*OVERSAMPLENR, 210}, {126*OVERSAMPLENR, 205}, {136*OVERSAMPLENR, 200}, {149*OVERSAMPLENR, 195}, {160*OVERSAMPLENR, 190}, {175*OVERSAMPLENR, 185}, {191*OVERSAMPLENR, 180}, {209*OVERSAMPLENR, 175}, {224*OVERSAMPLENR, 170}, {246*OVERSAMPLENR, 165}, {267*OVERSAMPLENR, 160}, {293*OVERSAMPLENR, 155}, {316*OVERSAMPLENR, 150}, {340*OVERSAMPLENR, 145}, {364*OVERSAMPLENR, 140}, {396*OVERSAMPLENR, 135}, {425*OVERSAMPLENR, 130}, {460*OVERSAMPLENR, 125}, {489*OVERSAMPLENR, 120}, {526*OVERSAMPLENR, 115}, {558*OVERSAMPLENR, 110}, {591*OVERSAMPLENR, 105}, {628*OVERSAMPLENR, 100}, {660*OVERSAMPLENR, 95}, {696*OVERSAMPLENR, 90}, {733*OVERSAMPLENR, 85}, {761*OVERSAMPLENR, 80}, {794*OVERSAMPLENR, 75}, {819*OVERSAMPLENR, 70}, {847*OVERSAMPLENR, 65}, {870*OVERSAMPLENR, 60}, {892*OVERSAMPLENR, 55}, {911*OVERSAMPLENR, 50}, {929*OVERSAMPLENR, 45}, {944*OVERSAMPLENR, 40}, {959*OVERSAMPLENR, 35}, {971*OVERSAMPLENR, 30}, {981*OVERSAMPLENR, 25}, {989*OVERSAMPLENR, 20}, {994*OVERSAMPLENR, 15}, {1001*OVERSAMPLENR, 10}, {1005*OVERSAMPLENR, 5} }; #endif #define _TT_NAME(_N) temptable_ ## _N #define TT_NAME(_N) _TT_NAME(_N) #ifdef THERMISTORHEATER_0 #define heater_0_temptable TT_NAME(THERMISTORHEATER_0) #define heater_0_temptable_len (sizeof(heater_0_temptable)/sizeof(*heater_0_temptable)) #else #ifdef HEATER_0_USES_THERMISTOR #error No heater 0 thermistor table specified #else // HEATER_0_USES_THERMISTOR #define heater_0_temptable 0 #define heater_0_temptable_len 0 #endif // HEATER_0_USES_THERMISTOR #endif #ifdef THERMISTORHEATER_1 #define heater_1_temptable TT_NAME(THERMISTORHEATER_1) #define heater_1_temptable_len (sizeof(heater_1_temptable)/sizeof(*heater_1_temptable)) #else #ifdef HEATER_1_USES_THERMISTOR #error No heater 1 thermistor table specified #else // HEATER_1_USES_THERMISTOR #define heater_1_temptable 0 #define heater_1_temptable_len 0 #endif // HEATER_1_USES_THERMISTOR #endif #ifdef THERMISTORHEATER_2 #define heater_2_temptable TT_NAME(THERMISTORHEATER_2) #define heater_2_temptable_len (sizeof(heater_2_temptable)/sizeof(*heater_2_temptable)) #else #ifdef HEATER_2_USES_THERMISTOR #error No heater 2 thermistor table specified #else // HEATER_2_USES_THERMISTOR #define heater_2_temptable 0 #define heater_2_temptable_len 0 #endif // HEATER_2_USES_THERMISTOR #endif #ifdef THERMISTORBED #define bedtemptable TT_NAME(THERMISTORBED) #define bedtemptable_len (sizeof(bedtemptable)/sizeof(*bedtemptable)) #else #ifdef BED_USES_THERMISTOR #error No bed thermistor table specified #endif // BED_USES_THERMISTOR #endif #endif //THERMISTORTABLES_H_ <ramps14test.ino> #include "thermistortables.h" #define X_STEP_PIN 54 #define X_DIR_PIN 55 #define X_ENABLE_PIN 38 #define X_MIN_PIN 3 #define X_MAX_PIN 2 #define Y_STEP_PIN 60 #define Y_DIR_PIN 61 #define Y_ENABLE_PIN 56 #define Y_MIN_PIN 14 #define Y_MAX_PIN 15 #define Z_STEP_PIN 46 #define Z_DIR_PIN 48 #define Z_ENABLE_PIN 62 #define Z_MIN_PIN 18 #define Z_MAX_PIN 19 #define E_STEP_PIN 26 #define E_DIR_PIN 28 #define E_ENABLE_PIN 24 #define Q_STEP_PIN 36 #define Q_DIR_PIN 34 #define Q_ENABLE_PIN 30 #define SDPOWER -1 #define EXTRUDERS 3 #define TEMP_SENSOR_AD595_OFFSET 0.0 #define TEMP_SENSOR_AD595_GAIN 1.0 #define THERMISTORHEATER_0 1 #define THERMISTORHEATER_1 1 #define THERMISTORHEATER_2 1 #define HEATER_0_USES_THERMISTOR 1 #define HEATER_1_USES_THERMISTOR 1 #define HEATER_2_USES_THERMISTOR 1 static void *heater_ttbl_map[EXTRUDERS] = { (void *)heater_0_temptable #if EXTRUDERS > 1 , (void *)heater_1_temptable #endif #if EXTRUDERS > 2 , (void *)heater_2_temptable #endif #if EXTRUDERS > 3 #error Unsupported number of extruders #endif }; static int heater_ttbllen_map[EXTRUDERS] = { heater_0_temptable_len #if EXTRUDERS > 1 , heater_1_temptable_len #endif #if EXTRUDERS > 2 , heater_2_temptable_len #endif #if EXTRUDERS > 3 #error Unsupported number of extruders #endif }; #define PGM_RD_W(x) (short)pgm_read_word(&x) #define SDSS 53 #define LED_PIN 13 #define FAN_PIN 9 #define PS_ON_PIN 12 #define KILL_PIN -1 #define HEATER_0_PIN 10 #define HEATER_1_PIN 8 #define TEMP_0_PIN 15 // ANALOG NUMBERING #define TEMP_1_PIN 14 // ANALOG NUMBERING #define TEMP_2_PIN 13 // ANALOG NUMBERING void setup() { pinMode(TEMP_0_PIN , INPUT); pinMode(TEMP_1_PIN , INPUT); pinMode(TEMP_2_PIN , INPUT); pinMode(FAN_PIN , OUTPUT); pinMode(HEATER_0_PIN , OUTPUT); pinMode(HEATER_1_PIN , OUTPUT); pinMode(LED_PIN , OUTPUT); pinMode(X_STEP_PIN , OUTPUT); pinMode(X_DIR_PIN , OUTPUT); pinMode(X_ENABLE_PIN , OUTPUT); pinMode(Y_STEP_PIN , OUTPUT); pinMode(Y_DIR_PIN , OUTPUT); pinMode(Y_ENABLE_PIN , OUTPUT); pinMode(Z_STEP_PIN , OUTPUT); pinMode(Z_DIR_PIN , OUTPUT); pinMode(Z_ENABLE_PIN , OUTPUT); pinMode(E_STEP_PIN , OUTPUT); pinMode(E_DIR_PIN , OUTPUT); pinMode(E_ENABLE_PIN , OUTPUT); pinMode(Q_STEP_PIN , OUTPUT); pinMode(Q_DIR_PIN , OUTPUT); pinMode(Q_ENABLE_PIN , OUTPUT); digitalWrite(X_ENABLE_PIN , LOW); digitalWrite(Y_ENABLE_PIN , LOW); digitalWrite(Z_ENABLE_PIN , LOW); digitalWrite(E_ENABLE_PIN , LOW); digitalWrite(Q_ENABLE_PIN , LOW); Serial.begin(115200); } float analog2temp(int raw, uint8_t e) { #ifdef HEATER_0_USES_MAX6675 if (e == 0) { return 0.25 * raw; } #endif if(heater_ttbl_map[e] != 0) { float celsius = 0; byte i; short (*tt)[][2] = (short (*)[][2])(heater_ttbl_map[e]); raw = (1023 * OVERSAMPLENR) - raw; for (i=1; i<heater_ttbllen_map[e]; i++) { if ((PGM_RD_W((*tt)[i][0]) > raw) && ((float)(PGM_RD_W((*tt)[i][0]) - PGM_RD_W((*tt)[i-1][0])) >0)) { celsius = PGM_RD_W((*tt)[i-1][1]) + (raw - PGM_RD_W((*tt)[i-1][0])) * (float)(PGM_RD_W((*tt)[i][1]) - PGM_RD_W((*tt)[i-1][1])) / (float)(PGM_RD_W((*tt)[i][0]) - PGM_RD_W((*tt)[i-1][0])); break; } } // Overflow: Set to last value in the table if (i == heater_ttbllen_map[e]) celsius = PGM_RD_W((*tt)[i-1][1]); return celsius; } return ((raw * ((5.0 * 100.0) / 1024.0) / OVERSAMPLENR) * TEMP_SENSOR_AD595_GAIN) + TEMP_SENSOR_AD595_OFFSET; } unsigned long prevMillis; void loop () { if (millis() %1000 <500) digitalWrite(LED_PIN, HIGH); else digitalWrite(LED_PIN, LOW); if (millis() %1000 <300) { digitalWrite(HEATER_0_PIN, HIGH); digitalWrite(HEATER_1_PIN, LOW); digitalWrite(FAN_PIN, LOW); } else if (millis() %1000 <600) { digitalWrite(HEATER_0_PIN, LOW); digitalWrite(HEATER_1_PIN, HIGH); digitalWrite(FAN_PIN, LOW); } else { digitalWrite(HEATER_0_PIN, LOW); digitalWrite(HEATER_1_PIN, LOW); digitalWrite(FAN_PIN, HIGH); } if (millis() %2000 <1000) { digitalWrite(X_DIR_PIN , HIGH); digitalWrite(Y_DIR_PIN , HIGH); digitalWrite(Z_DIR_PIN , HIGH); digitalWrite(E_DIR_PIN , HIGH); digitalWrite(Q_DIR_PIN , HIGH); } else { digitalWrite(X_DIR_PIN , LOW); digitalWrite(Y_DIR_PIN , LOW); digitalWrite(Z_DIR_PIN , LOW); digitalWrite(E_DIR_PIN , LOW); digitalWrite(Q_DIR_PIN , LOW); } digitalWrite(X_STEP_PIN , HIGH); digitalWrite(Y_STEP_PIN , HIGH); digitalWrite(Z_STEP_PIN , HIGH); digitalWrite(E_STEP_PIN , HIGH); digitalWrite(Q_STEP_PIN , HIGH); delay(1); digitalWrite(X_STEP_PIN , LOW); digitalWrite(Y_STEP_PIN , LOW); digitalWrite(Z_STEP_PIN , LOW); digitalWrite(E_STEP_PIN , LOW); digitalWrite(Q_STEP_PIN , LOW); if (millis() -prevMillis >500){ prevMillis=millis(); int t = analogRead( TEMP_0_PIN); Serial.print("T0 "); Serial.print(t); Serial.print("/"); Serial.print(analog2temp(1024 - t,0),0); Serial.print(" T1 "); t = analogRead( TEMP_1_PIN); Serial.print(t); Serial.print("/"); Serial.print(analog2temp(1024 - t,1),0); Serial.print(" T2 "); t = analogRead( TEMP_2_PIN); Serial.print(t); Serial.print("/"); Serial.println(analog2temp(1024 - t,2),0); } } |
步驟3:連接機械端子擋塊
機械端子擋塊有兩種類型:兩個引腳和三個引腳。本課程中,我們使用三個引腳的端子擋塊,這與兩個引腳端子擋塊的安裝幾乎相同。對於三個引腳的端子擋塊,將綠色訊號線插入RAMPS的S引腳,黑色接地線插入負極,紅色正極線插入正極。

圖3:機械端子擋塊連接
對於兩個引腳的端子擋塊,需要將紅色正極線插入RAMPS的S引腳,將黑色接地線插入負極。應使用6個端子擋塊:每個軸最大值處和最小值處。圖4顯示了完成了所有連接的RAMPS板。

圖4:連接到RAMPS的機械端子擋塊
可能需要反復試驗才能找到端子擋塊的最佳位置。
步驟4:連接螢幕
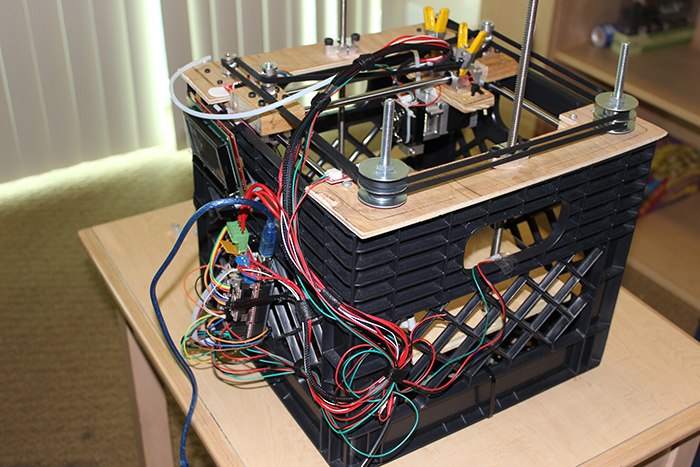
取出您的全佈局智慧控制器。將兩條帶狀電纜與螢幕和擴展板連接。把擴展板按壓到RAMPS的末端。用膠帶將螢幕粘貼到奶箱上可以避免機械干擾的位置。圖5顯示了元件的設定方式。

圖5:螢幕放置視圖
步驟5:下載並配置Marlin
Marlin被用於印表機的運行,而非用於編寫整個代碼。它將檔轉換為G代碼,調整列印床平整度,並創建一個使用者友好的介面。可以在以下位置找到Marlin固件: https://github.com/MarlinFirmware/Marlin。下載檔案並在Arduino IDE中打開。
Marlin可用於許多不同的應用程式,例如RAMPS。因此,我們需要進行一些配置。
首先,需要判斷一下自己使用的是什麼板。課程中將假設您使用了RAMPS 1.4。如果您使用的是另一塊板,請檢查Marlin中的boards.h檔,以找到適合您的板的變數。打開Marlin中的Configuration.h文件。
搜索該命令列:#define MOTHERBOARD。刪除初始值並輸入與RAMPS 1.4 EFB板關聯的數位43。
搜索該語句:#define CUSTOM_MACHINE_NAME “3D Printer”。您可以根據自己的需要更改機器名稱。
搜索該語句:#define MACHINE_UUID “00000000-0000-0000-0000-000000000000”。將UUID更改為一個隨機生成的UUID,使它成為用於藍牙通信的唯一位址。
搜索該語句:#define EXTRUDERS 1。如果使用了一台擠出機,請確保將其設定為1;如果使用了兩台,請確保將其設定為2。此外,在本節中,您可以為第二台擠出機定義其他參數。
搜索該語句:#define POWER_SUPPLY 1。如果使用的是OEM電源,則將1換為0。如果您使用的是ATX,請使用1。如果您使用了其他電源,請參閱相關文件。
搜索該語句:#define TEMP_SENSOR_0。這定義了擠出機的熱感應電阻阻值。大多數為100K,應定義為1。請查看相關文件來確定您的熱感應電阻阻值。在本節中的剩餘部分中可以對您所使用的其他熱感應電阻阻值進行定義。
搜索該語句:#define HEATER_0_MINTEMP。本部分確定熱端的安全溫度範圍。請確保在本節中輸入安全值。
搜索該語句:#define EXTRUDE_MINTEMP 170。這表示如果擠出機的溫度低於170攝氏度,印表機將不會行動。如果您的熱感應電阻產生了問題,請切記這一要點。
搜索該語句:#define THERMAL_PROTECTION_HOTENDS。取消該行的注釋,可以啟用更智慧的熱量控制功能。該功能使用熱感應電阻測量溫度,並設定了一個計時器。如果自測量開始,溫度顯著升高,那麼將會停止列印。這樣可以防止會導致印表機過熱的熱感應電阻的鬆動。
搜索該語句:#define COREXY。這是本課程中使用的皮帶配置的名稱。本節中還可以對其他特殊配置進行設定。
搜索該語句:#define INVERT_X_DIR。在本部分中,您可以對任何軸的方向進行更改。這對於調試很有用。
搜索該語句:#define DEFAULT_AXIS_STEPS_PER_UNIT。本節是配置過程的關鍵部分,您可以在此設定每單位長度的步數。這取決於您的同步皮帶輪,螺杆和擠出機的型號。在本課程中,我們使用了:G2T同步帶和同步帶輪,一個Mk8擠出機和一個8mm螺距的螺釘。這表示我們要輸入的值為:78.74, 78.74, 2560, 和95。
搜索該語句:#define EEPROM_SETTINGS。請確保其可以執行。您可以透過該語句在無需重新載入固件的前提下對固件設定進行更改。
搜索該語句:#define LANGUAGE_INCLUDE GENERATE_LANGUAGE_INCLUDE(en)。該語句用來選擇使用者介面的語言。請確保使用language.h檔將其設定為您的首選語言。
搜索該語句:#define SDSUPPORT。取消此行的注釋,您就可以使用智慧控制器上的SD卡插槽進行列印。這可以使印表機成為獨立於您的電腦的系統。
搜索該語句:#define REPRAP_DISCOUNT_FULL_GRAPHIC_SMART_CONTROLLER。取消此行注釋,您就可以使用本文中所使用的智慧控制器。如果您想要使用其他控制器,請在列表中搜索找到該控制器,並將其注釋取消掉。
最後,上傳您的代碼並進行測試。點擊按鈕以顯示功能表,找到準備(Prepare)功能表。找到行動軸選項。確保對每個軸都進行了測試。以下視訊將顯示一切正常情況下的測試結果。
步驟6:收尾工作
夾住頂板的邊緣。請確保所有的電纜都正確連接並收納妥當。
請確保所有坐標軸歸位於最小值。
請確保所有元件都可以正常工作。在必要時對設定進行調整。
步驟7:您的第一台印表機
現在,您可以準備開始第一次3D列印了。透過以下連結下載3D列印切片程式Cura: https://ultimaker.com/en/products/cura-software。
下載後,打開程式並根據您的印表機對其進行配置。選擇自訂FDM印表機。輸入最大構建尺寸:105mm x 130mm x 80mm。對其他需要輸入的尺寸用尺子進行測量。請確保G代碼風格為RepRap Marlin。
現在,您只需要一張裝有要列印的STL檔的SD卡即可。基於RepRap的理念,我建議您以列印用於改進此印表機的零零件開始。