
DIY Raspberry Pi無人機第二部分–Naza-M Lite指南

在之前的文章《DIY Raspberry Pi無人機:機械構造–第1部分》 和 《DIY Raspberry Pi無人機:機械構造–第1部分(續)》中,我們介紹了系統中的單個硬體,並組裝完成了四軸飛行器。在第二部分中,我們將介紹該四軸飛行器的軟體部分。我們將配置射極器和接收器並連接到NAZA。
透過該專案,我們可以利用一些現成的元件組裝一台能夠拍攝高品質航拍照片以及穩定高清視訊的四軸飛行器。該飛行器還會配備多種安全功能,所以新手也可以自信地操作該四軸飛行器。四軸飛行器的即時視訊流透過Wifi從Raspberry Pi傳輸到行動裝置上。該無人機還搭載了一個Linux電腦,這會為我您來許多創造性—額外的感測器,電腦視覺等。
硬體
第一部分組裝的四軸飛行器:
- DJI F450 ARF(幾乎到手即飛)套件
- 3300mAh 3S 35C LiPo 電池(附帶T型連接器)
- EV-Peak – AP606 – 50W DC LiPo 電池充電器/放電器 (大多數LiPo充電器都適用)
- RadioLink AT9 2.4GHz 9CH 射極器,R9D 9CH接收器
- Xiaomi Yi 運動相機(附帶microSD卡)
- FeiYu Tech Mini 3D 3軸無刷萬向節
- Raspberry Pi (Model A+), microSD 卡
- Raspberry Pi 相機模組
- 任意支援802.11a/n/ac(5GHz頻段)的USB無線網卡——本專案用的是D-Link DWA-160
- 各種公母T型連接器
- RadioLink AT9 2.4GHz 9CH 射極器,R9D 9CH接收器
- 吸盤式車電手機支架
- 4個M3螺栓,8個M3螺母
- 安卓手機
- MicroB USB 資料線
軟體
- Naza-M Lite Assistant (點擊此處下載)
射極器和接收器配置
第1步:配置模式類型
射極器第一次開機時,您將會看到一個與下圖非常相似的功能表。此功能表包含幾個很有用的指示標誌:右上方是射極器的電池電壓;電池電壓正下方是四軸飛行器的飛行模式;電池電壓的左側是射極機與接收機之間的訊號強度;T1和T2是可以透過切換啟動的計時器。
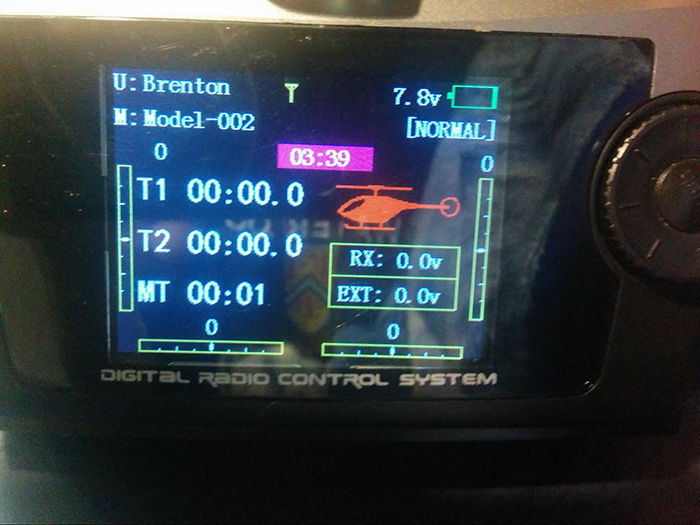
圖1. 射極器主螢幕
要訪問配置功能表我們需要配置射極器,只需要簡單地按下Mode按鈕。用螢幕右側的滾輪選擇MODEL TYPE選項,然後透過按下滾輪進入功能表。(現在開始,我將定義這個操作為按下回車鍵)。
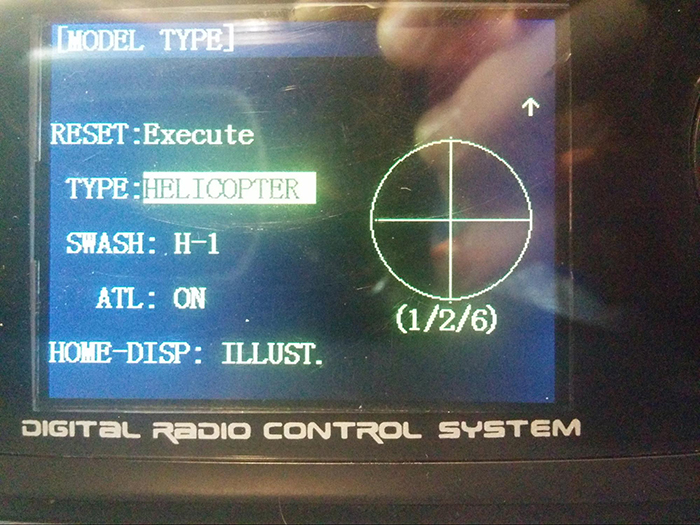
圖2. 模式配置功能表
如您所見,我們的射極器預設配置為“HELICOPTER”,為了讓我們的射極器為四軸飛行器工作,我們必須將模式改成“AIRCRAFT”。為此,先選擇“TYPE”,然後按下中間按鈕,滾動選擇到“AIRCRAFT”,按下回車鍵保存您的選項。
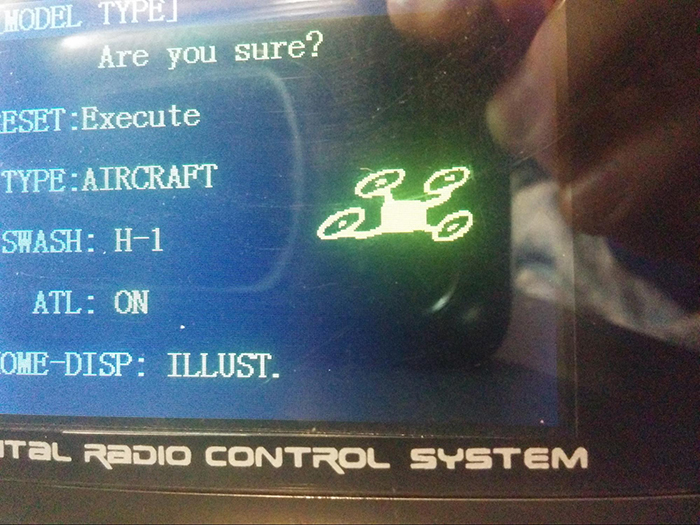
圖3. 調整模式類型後的模式配置功能表
將模式類型設定為AIRCRAFT後,您將看到如圖3所示的四軸飛行器圖示。接下來讓我們配置端點值!
第2步:配置通道端點值
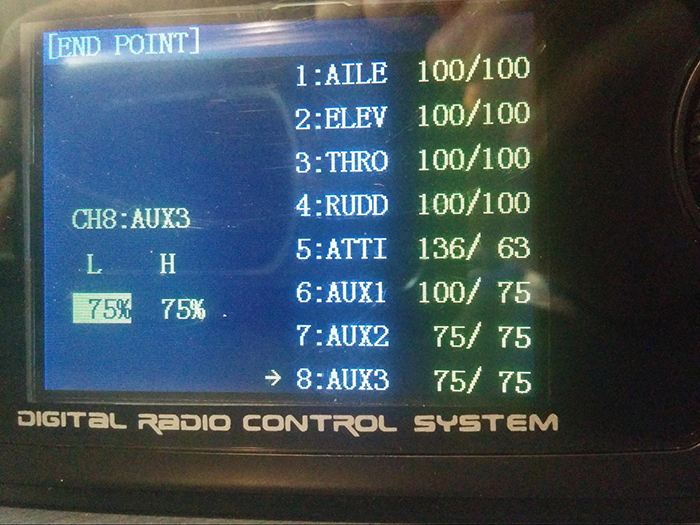
圖4. 通道端點菜單
進入END POINT菜單。前四個通道保持不變。但是,我們需要更改通道5和通道6的端點值。使用滾輪選擇第五個通道,然後按回車鍵,並調整通道的低點(L)和高點(H),使其與上圖匹配。
第3步:配置通道反向
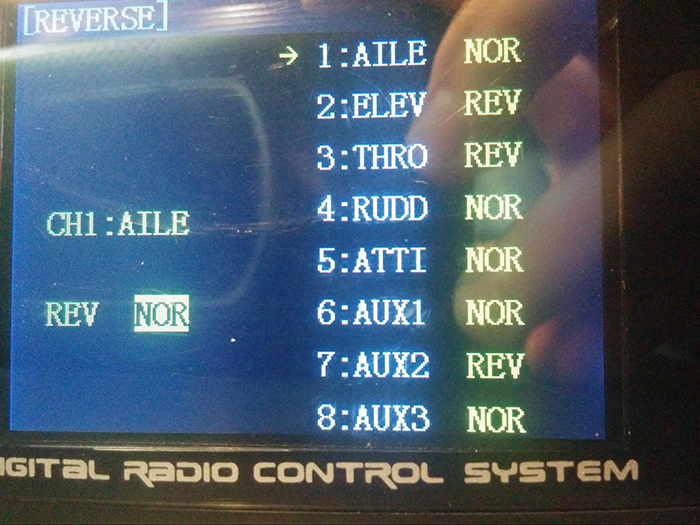
圖5. 通道反向菜單
射極器的“ELEVATOR”通道和”THROTTLE”通道默認反向,為了糾正這個問題,我們進入“REVERSE”功能表並且反轉”ELEV”通道和“THRO”通道。選擇相應通道,按下回車鍵,使用滾輪將NOR更改為REV。
第4步:配置次要通道
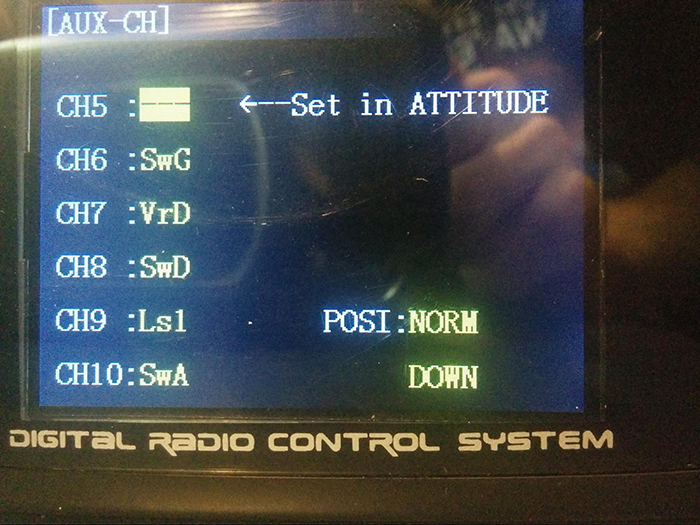
圖6. 次要通道菜單
要將三向切換連結到飛行模式和方向鎖定通道,請進入AUX-CH菜單。在此頁面上,只需將CH6切換設定為SwG即可。
第5步:配置故障保護模式
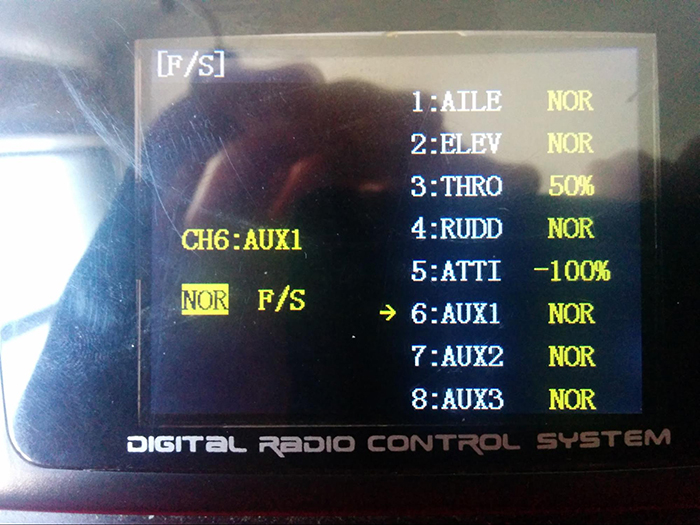
圖7. 故障保護配置功能表
如果射極器與接收器的連接中斷,我們希望四軸飛行器能自動進入故障保護模式。為此,請進入F/S菜單,按照上圖設定故障保護通道的數值。實際上,我們將“AILERON”、“ELEVATOR”、“RUDDER”設為預設值,將“THROTTLE”設為50%(懸停),將飛行模式切換至故障安全模式。
第6步:下載並安裝NAZA-M Lite Assistant
要配置NAZA-M Lite,我們需要在Windows電腦上安裝NAZA-M LiteAssistant。您 可以點擊此處下載。請按照螢幕上的說明進行安裝。
第7步:配置並連接到NAZA
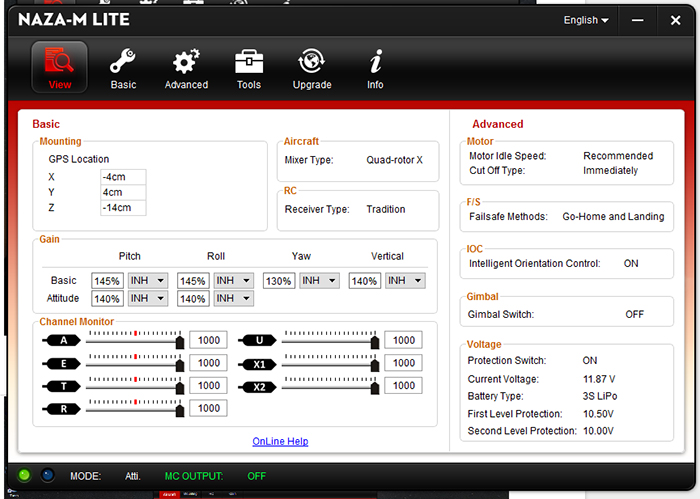
圖8. DJI NAZA-M Lite Assistant主頁
NAZA-M Lite的飛行模式有多種。我們來看一下3種控制模式。
控制模式 – DJI Wiki
- GPS姿態模式(GPS Attitude Mode):與GPS巡航模式相同。唯一的區別是該模式控制的是直升機姿態。操縱杆的中心位置為0°姿態,端點為45°,這是一個固定限制。GPS姿態模式可用於大型飛行運動,能為您帶來出色的新型飛行體驗。
- 對於Ace系列、WooKong-H系列和Naza-M系列,端點是45°。
- 對於WooKong-M系列,端點是35°。
- 姿態模式(Attitude Mode):適用於無GPS訊號或GPS訊號弱的環境。Ace One可以精確地控制姿態穩定性並準確鎖定飛行高度;操縱杆的中心位置為0°姿態,端點為45°,這是一個固定限制。姿態模式可用於大型飛行運動。
- 對於Ace系列、WooKong-H系列和Naza-M系列,端點是45°。
- 對於WooKong-M系列,端點是35°。
- 手動模式(Manual Mode):就是直接進行機械驅動。除無平衡翼功能外,系統的自動駕駛儀不能保持飛機平穩。所以手動模式適合經驗豐富的操作人員。
故障保護功能啟用後,四軸飛行器不再響應您的輸入命令,並自動返回其起飛位置。當四軸飛行器失去控制或者四軸飛行器距離您太遠而無法輕鬆將其帶回家時,此功能非常有用(特別是對於飛行新手)。
第8步:配置方向
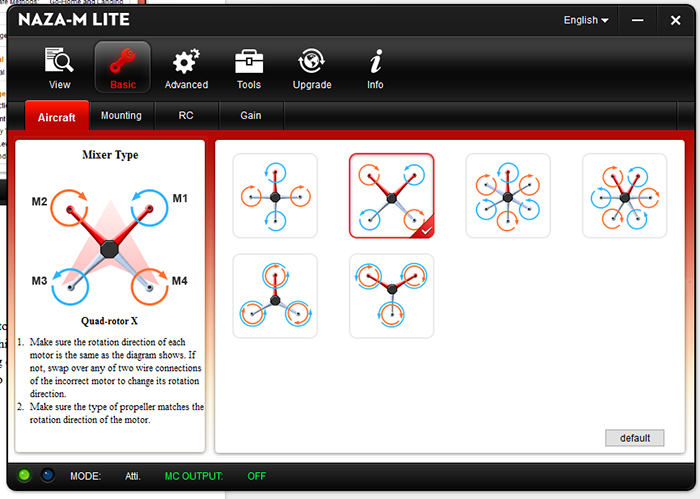
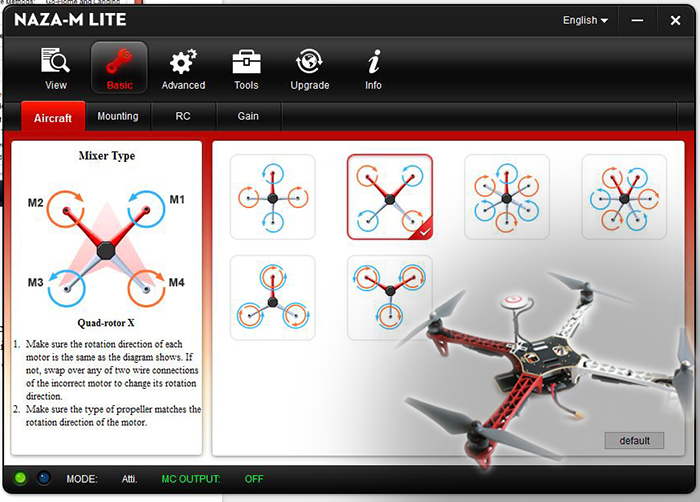
圖9. 框架佈局選擇介面
在Aircraft選項卡中,我們可以選擇無人機的框架佈局。我們應選擇“Quad-rotor X”。沒有選擇第一個選項“Quad-rotor I”的原因是方向。您還記得下圖吧?
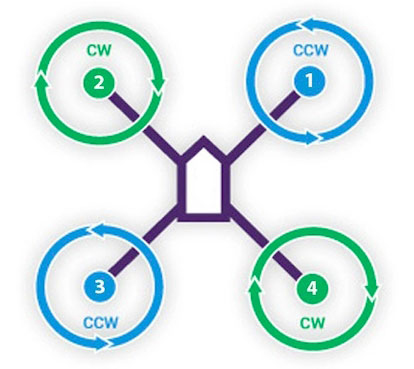
圖10. NAZA的馬達編號定義 / Ⓒkenstone6.net
之前我們根據上圖顯示的馬達旋轉方向將馬達連至飛行控制器。圖9中的紅色機臂,即圖10中的M2和M1表示四軸飛行器的前部。
第9步:配置GPS Mounting
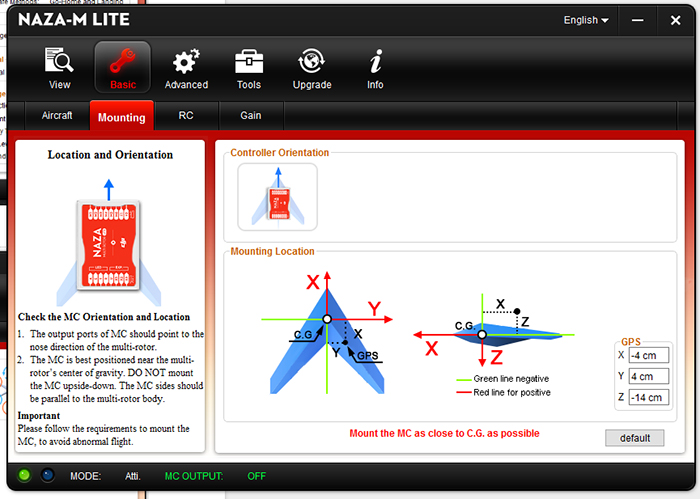
圖11. GPS Mounting設定
在Mounting選項卡中,我們需要輸入GPS座標。首先,您需要平衡四軸飛行器的重心使其在中心板的正中。然後,在X、Y、Z軸(圖11)填入GPS的機身中點以及四軸飛行器重心。MC ESC埠的方向應指向機頭方向。
第10步:配置RC
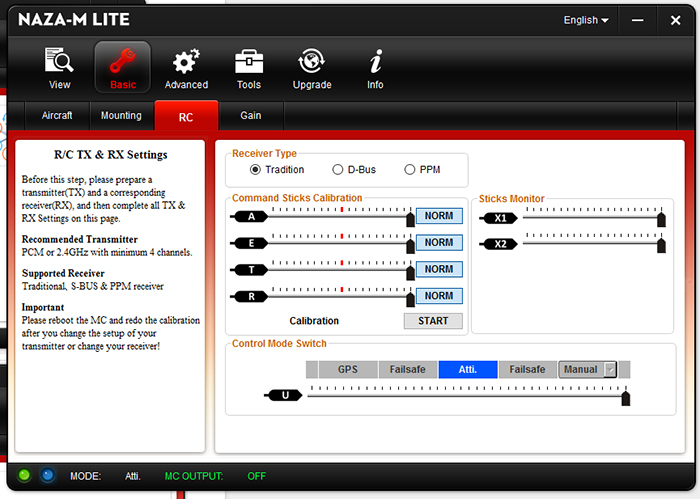
圖12. R/C TX和RX設定
在此頁面上,您可以查看每個通道的數值和當前的飛行模式。確保將Receiver Type選為Tradition。其他選項保持不變。“Gain”頁面可以忽略。
第11步:配置馬達怠速
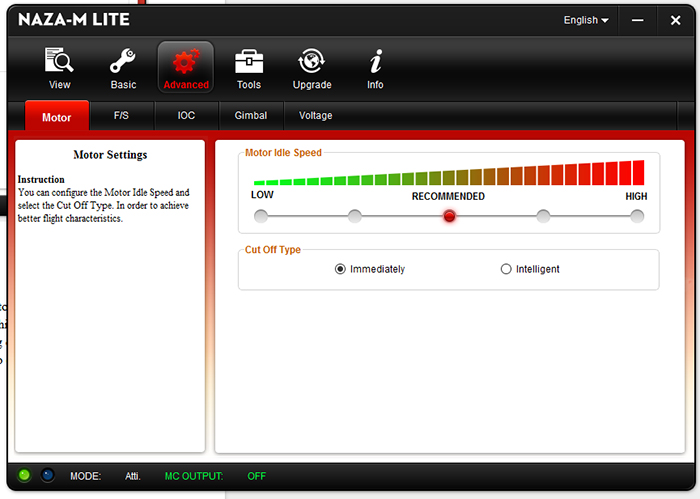
圖13. 馬達設定
請將Motor Idle Speed設為RECOMMENDED,將Cut Off Type設為Immediately。
第12步:啟用故障保護
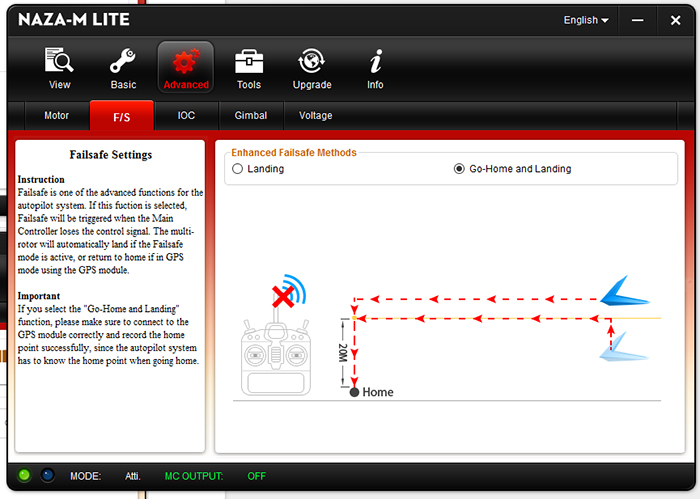
圖14. 故障保護設定
這是我們選擇進入故障保護飛行模式時發生的情況的頁面。我選擇了“Go-Home and Landing”而不是“Landing”,這是因為故障保護功能啟動後,“Landing“會讓無人機在當前位置立即降落,即使這並不是一個安全的降落點。取而代之的” Go-Home and Landing”選項會讓四軸飛行器升至20m的高度(如果飛行高度高於20m,那麼保持不變),然後自己飛到起飛點上方,然後慢慢降落。
第13步:啟用方向鎖定
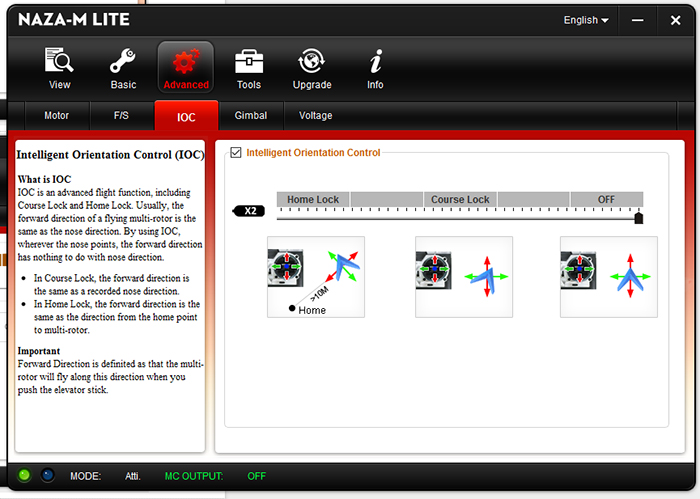
圖15. 智慧方向控制(IOC)設定
IOC基本上是無頭模式,當您嘗試將相機定位某個特定角度時很有用。有兩種鎖定方式:返航點鎖定(前進方向=記錄的機頭方向)和航向鎖定(前進方向=四軸飛行器的原點)。我們不會使用這些鎖定。請將這2個通道設為“OFF”。
請忽略“Gimbal”配置頁面。
第14步:配置電池故障保護
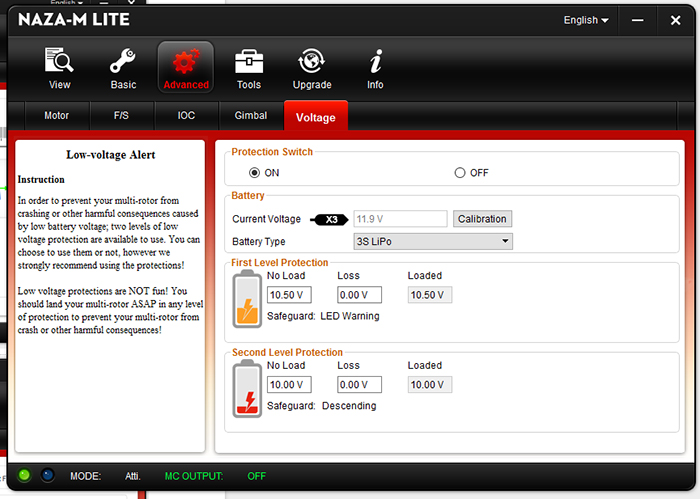
圖16. 電池故障保護頁面
正如本系列第1部分描述的,使用LiPo電池時一定要小心,務必確保安全。飛行過程中我們最應該關注電池的電壓。為防止電池過度放電,將Protection Switch設定為”ON”來啟用低電壓警報,然後將電池類型更改為3S LiPo。我建議將“First Level Protection”負載電壓設定為10.50V,將“Second Level Protection”負載電壓設定為10.00V。
“First Level Protection“只會導致NAZA LED指示燈紅光快速閃爍。如果在飛行過程中看到此警報,應安全降落無人機。如果等待“二級保護”生效,那麼四軸飛行器會自動著陸,以防止電池損壞。
第15步:校準IMU
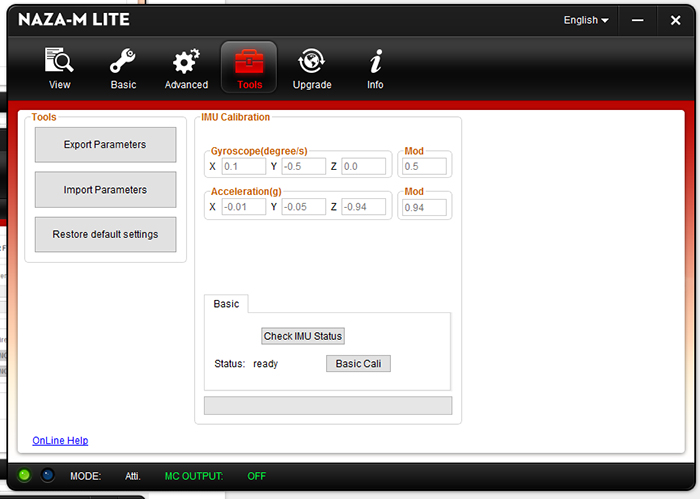
圖17. IMU校準頁面
第一次駕駛四軸飛行器之前,請務必校準陀螺儀和加速度計。為此,只需將四軸飛行器放在一個水平面上,然後按一下頁面底部附近的“Basic Cali”按鈕即可。
本文到此結束!在下一篇文章中,我們將介紹如何設定FPV。這部分非常重要,因為它允許透過WiFi將四軸飛行器的即時視訊流從Raspberry Pi傳送到行動裝置。我們會用到一部安卓手機。我們還將在飛行四軸飛行器之前創建一個飛行前檢查清單。