
DIY Raspberry Pi 無人機:機械構造 – 第一部分


今天,我們將利用一些現成的元件組裝一台能夠拍攝高品質航拍照片以及穩定高清視訊的四軸飛行器。該飛行器還會配備多種安全功能,所以新手也可以自信地操作該四軸飛行器。四軸飛行器的即時視訊流透過Wifi從Raspberry Pi傳輸到行動裝置上。該無人機還搭載了一個Linux電腦,這會為您帶來許多創造性——額外的感測器、電腦視覺等。
在本系列的第一部分中,我們首先介紹四軸飛行器的硬體——需要哪些零件,它們有什麼作用,如何組裝在一起。在本系列的第二部分和第三部分中,我們將介紹四軸飛行器的軟體——故障保護功能、遙控和飛行模式。
硬體:
- DJI F450 ARF(幾乎到手即飛)套件
- 3300mAh 3S 35C LiPo 電池(附帶T型連接器)
- EV-Peak – AP606 – 50W DC LiPo 電池充電器/放電器(大多數LiPo充電器都適用)
- RadioLink AT9 2.4GHz 9CH 射極器,R9D 9CH接收器
- Xiaomi Yi 運動相機(附帶microSD卡)
- FeiYu Tech Mini 3D 3軸無刷萬向節
- Raspberry Pi(Model A+), microSD卡
- Raspberry Pi 相機模組
- 任意支援 802.11a/n/ac(5GHz 頻段)的USB無線網卡——本專案用的是D-Link DWA-160
- 備用 micro USB
- 各種公母T型連接器
- RadioLink AT9 2.4GHz 9CH 射極器,R9D 9CH 接收器
- 吸盤式車電手機支架
- 4個M3螺栓,8個M3螺母
- 安卓手機
工具:
- 電烙鐵
- 焊料
- 內六角扳手
- 熱熔膠槍
- 熱熔膠棒
啟動該項目之前,我們必須瞭解四軸飛行器各個部分的作用。下文列出了構建該四軸飛行器所需的零零件及其用途,以及本課程中所使用的每個零零件的具體型號。
- 機架:
- 作用: 該機架為安裝馬達和電子裝置提供了一個簡易環境
- 本專案所使用的零件: DJI Flame Wheel 450 (F450) 機架(包含在ARF套件中)
- 無刷馬達和螺旋槳:
- 作用: 馬達帶動螺旋槳旋轉產生推力,以抬升四軸飛行器
- 本專案所使用的零件: DJI E305 960KV馬達和DJI 9450螺旋槳(兩者均包含在ARF套件中)
- 電子調速器(ESC):
- 作用: ESC為無刷馬達供電,並提供PWM介面,以允許飛行控制器控制每一個馬達的速度和推力
- 本專案所使用的零件: DJI E305 960KV馬達(包含在ARF套件中)
- 飛行控制器:
- 作用: 顧名思義,飛行控制器負責控制四軸飛行器如何飛行。飛行控制器其實是一台小型電腦,配備了慣性測量裝置(IMU,包含陀螺儀和加速度計),目的是保持四軸飛行器穩定。飛行控制器還搭載了氣壓計、GPS和磁力計,以便讓飛行控制器分別知道它目前的高度,所處的地區,面朝的方位。
- 本專案所使用的零件: NAZA-M Lite,附帶GPS套件(包含在ARF套件中)
- 穩壓器、飛行控制器狀態LED/USB介面:
- 作用: 穩壓器旨在為飛行控制器提供5V恒壓。狀態LED負責在飛行過程中將四軸飛行器的狀態資訊傳遞給操縱人員。狀態LED燈包括電池電量低指示和GPS鎖定指示。USB介面則允許我們在電腦上配置飛行控制器(我們將會在第2部分用到)。
- 本專案所使用的零件: 穩壓器和狀態LED燈包含在NAZA-M Lite中
- 電池:
- 作用: 鋰聚合物(LiPo)電池具有較高的能量重量比以及較大的最大放電電流,因此是為四軸飛行器提供動能的首選方式。在將LiPo電池裝上四軸飛行器之前,瞭解如何安全地使用和充電是非常重要的。否則,可能會引起火災及爆炸。有一些電池規格需要瞭解,它們的定義如下:
- 容量:電池以特定電流放電,“耗盡”之前能夠持續的放電時間。比如,如果一個電池的容量是1200mAh(毫安培小時),然後連續向外界提供一個1000mA的電流,那麼在1200mAh/1000mA = 1.2小時後,該電池耗盡。通常,電池壽命=容量(mAh)/電流(mA)。但我們建議在LiPo電池剩餘電量在20%時就對其進行充電。
- 電池芯數量:每個LiPo電池由1個或多個電池芯組成。一個電池內的電池芯串聯連接,因此電池的總電壓即為各個電池芯電壓的總和。LiPo電池的電池芯數量通常為電池上字母“S”之前的數位——2S表示電池是兩芯電池。
- 放電率:放電率反映了電池的最大安全放電電流。LiPo電池的放電率通常為電池上字母“C”之前的數位——標記為35C的電池可提供的最大電流為“35 x 容量”。
- 本專案所使用的零件: 本專案使用的電池為ReadyMadeRC 3300mAh 3S 35C LiPo電池(附帶T型連接器)。
- LiPo 電池充電器:
- 作用: LiPo電池充電器負責對LiPo電池進行安全充電。請注意,必須用LiPo電池充電器充電,而不能用其他充電器(例如鎳鎘電池或者鎳氫電池充電器)。
- 本專案所使用的零件: EV-Peak–AP606–50W DC充電器/放電器
- 射極器+接收器:
- 作用: 射極器透過多個操縱杆和切換接收操作人員指令,然後透過Wifi發送到四軸飛行器的接收器上。接收器負責解碼操作人員的命令,然後將其轉發給飛行控制器。
- 本專案所使用的零件: RadioLink AT9 2.4GHz 9CH射極器,R9D 9CH接收器
- 萬向節 + 相機
- 作用: 有了相機和萬向節,四軸飛行器就能變成一個拍攝專業鏡頭的航拍平台。相機安裝在萬向節上,而萬向節的動作實際上與四軸飛行器的相反——確保相機始終保持水平。
- 本專案所使用的零件: Xiaomi Yi 運動相機,FeiYu Tech Mini 3D 3軸無刷萬向節
- RPi,RPi相機,WiFi無線網卡:
- 作用: 雖然安裝在萬向節上的相機能夠以驚人的2K解析度錄製視訊,但是,如果我們無法確定想要拍攝的物體是否位於鏡頭內,再好的攝像裝備也沒用。Raspberry Pi相機透過5GHz WiFi無線網卡連接到Raspberry Pi 3代A +。因此,Raspberry Pi可以將前向Raspberry Pi相機的即時視訊流傳輸至透過WiFi連接的任何裝置。
- 本專案所使用的零件: Raspberry Pi Model A+,Raspberry Pi相機模組,D-Link DWA-160。
- 安卓手機,手機支架:
- 作用: 手機的作用是為Raspberry Pi提供Wi-Fi熱點,並提供一個顯示幕幕,方便我們查看無人機傳輸的即時視訊流。手機支架負責將手機與射極器連在一起。
- 本專案所使用的零件: LG Nexus 5(任何支援行動熱點的安卓手機都可以)。任意一端是吸盤、另一端是磁性零件的手機支架。
組裝步驟:
第1步:將ESC焊接到底板上
我們使用的DJI F450機架包含一個頂板和一個底板,安裝完成後,它們應該將四個機臂“夾在中間”。每個機臂的末端安裝一個馬達,機臂下方安裝一個ESC。這兩塊板將四個機臂固定在一起,並為四軸飛行器上的所有元件提供了一個安裝表面。
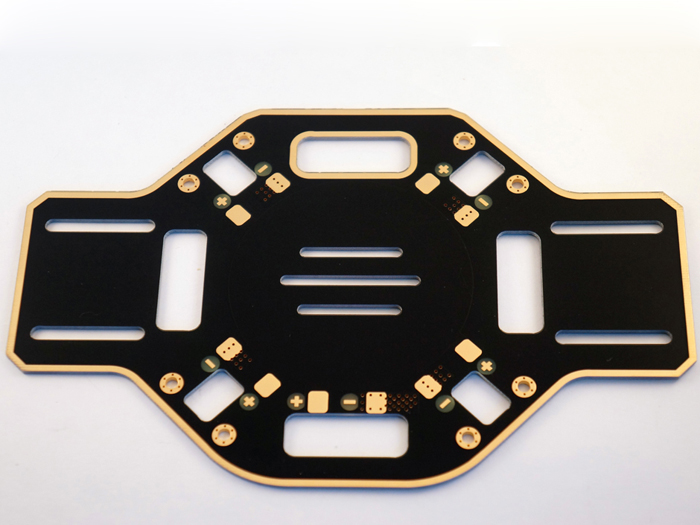
圖1:DJI Flamewheel機架底板 /©QuadcopterGarage
底板有一個非常重要的功能:它將電池的能量分配給所有的ESC。如上圖所示,底板上有五對正負極焊盤——每個ESC用一對,電池連接器用一對。每個ESC(電子調速器)都有兩條電纜:一根雙線PWM訊號線和一根較粗的黑色電源線。

圖2:電子調速器(ESC)
目前我們只關注調速器的電源線,後面再將PWM訊號線連接到飛行控制器。這根電源線太長,可以將其剪成約12釐米長。然後剝掉電源線上的一段黑色絕緣層,露出紅色電線(正極)和裸線(負極)。將紅線焊接到焊盤(+)上,將裸線焊接到焊盤(-)上。為了防止短路,我在焊盤上打了熱熔膠。請為每個馬達重複此過程。
第2步:將穩壓器和電池導線焊到底板上
將ESC焊接到底板上之後,您會看到還剩下一對焊盤(圖1底部的焊盤)。這對焊盤是用來連接電池導線和穩壓器導線的(圖3)。
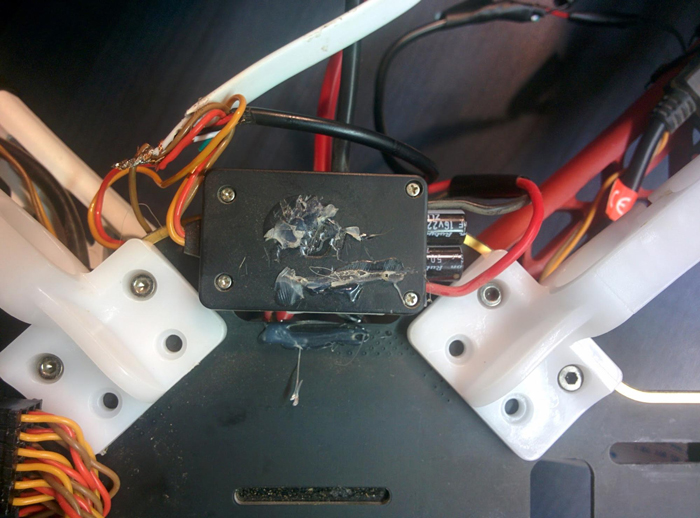
圖3:兩個白光支腿之間的黑色矩形穩壓器
NAZA-M Lite盒中應包含兩根大規格的導線——一根紅色和一根黑色。將盒中的紅色導線和穩壓器的紅色導線焊接到正極(+)焊盤上。將盒中的黑色導線和穩壓器的黑色導線焊接到負極(-)焊盤上。為了防止短路,我在焊盤上打了熱熔膠。
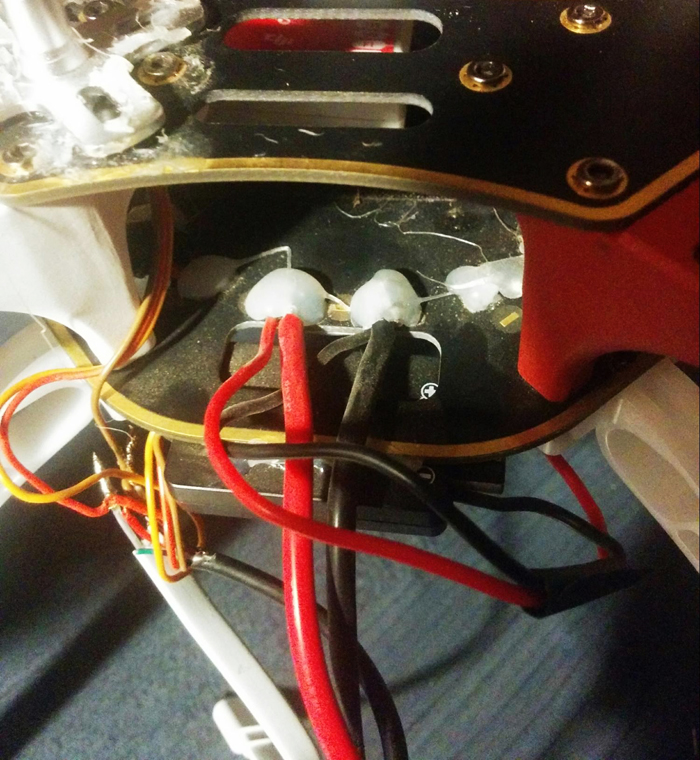
圖4:焊接到配電板上的電池和穩壓器導線
第3步:連接T型連接器
我們不能直接將電池焊接到上述導線,因為那樣的話我們將無法更換電池或為電池充電。要將電池連接至底板中的配電板,我們需要將一個公的T型連接器焊接到我們剛剛焊接的那兩根導線上。為此,將連接器的短邊朝上,將紅色導線焊接到較短的水平部分,將黑色導線焊接到較短的垂直部分(有關極性,請參見下圖右側的連接器)。
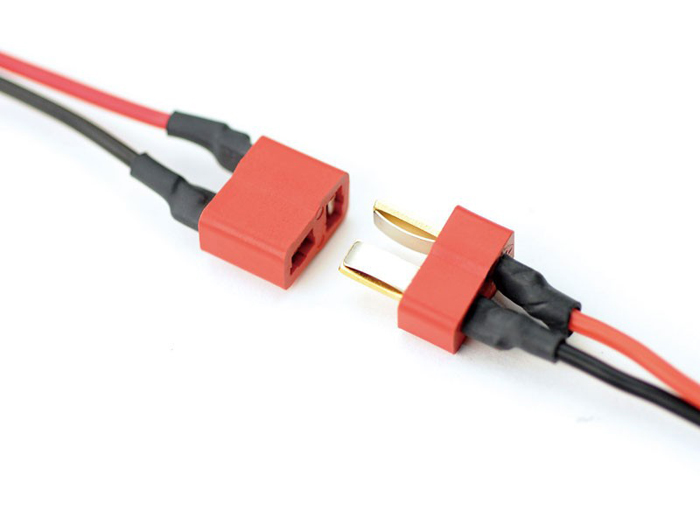
圖5:T型連接器的極性 / ©Ruberkon
完成焊接後,連接器的樣子如下所示(我用電工膠帶包住了裸露的金屬部分,當然您也可以用熱縮管):
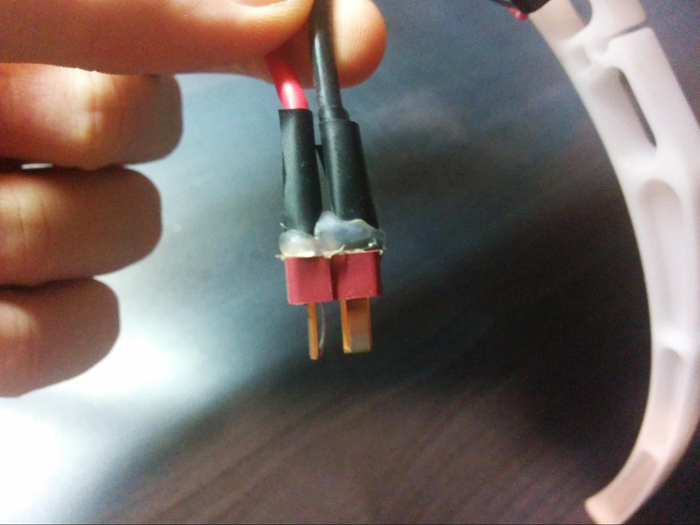
圖6:連接電池的T型連接器
第4步:安裝飛行控制器

圖7:NAZA-M Lite飛行控制器 / ©djicdn.com
將NAZA-M Lite附帶的黑色雙面膠切成與飛行控制器一樣長。撕掉雙面膠一面的保護膜,然後將其牢固地粘在底板的中間。然後,將飛行控制器標有M1、M2、M3等多個標籤的一側朝著底板上您認為是四軸飛行器正面的那一側。撕下雙面膠另一面的保護膜,將飛行控制器粘在上面。
第5步:安裝RC接收器
我選擇將RC接收器安裝在機架背面底板底部延伸處,用熱熔膠或者雙面膠對其簡單固定。從接收器伸出的那根導線是天線,暫時不用管它,等組裝支腿的時候再考慮。
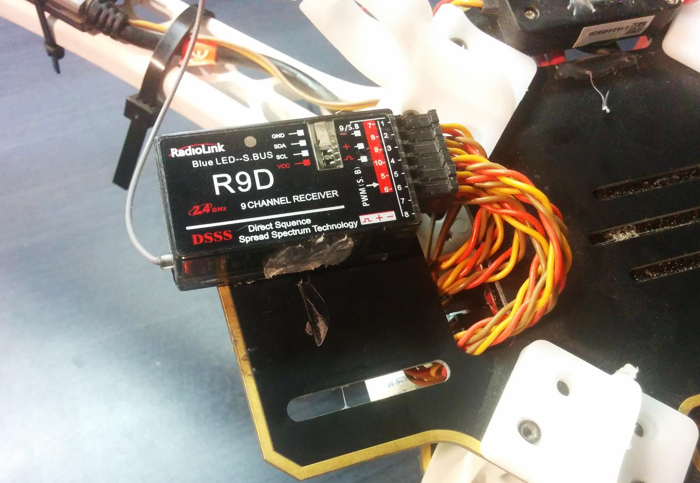
圖8:位於機架背面下方的接收器
第6步:將接收器的伺服線連至飛行控制器
接收器上每三個一列的引腳會輸出一個PWM訊號。在RC領域,每個PWM訊號都稱為一個通道,代表操縱人員命令的一個組成部分。比如,接收器的通道3是操縱人員所需的加速訊號。為了讓飛行控制器能夠接收操縱人員的每個命令,我們必須使用一根PWM訊號線將接收器上的每個通道連接到飛行控制器。請注意,插入飛行控制器時,PWM訊號線上的橙色(訊號)導線應位於頂部,而棕色導線的另一端連接接收器時應朝下。
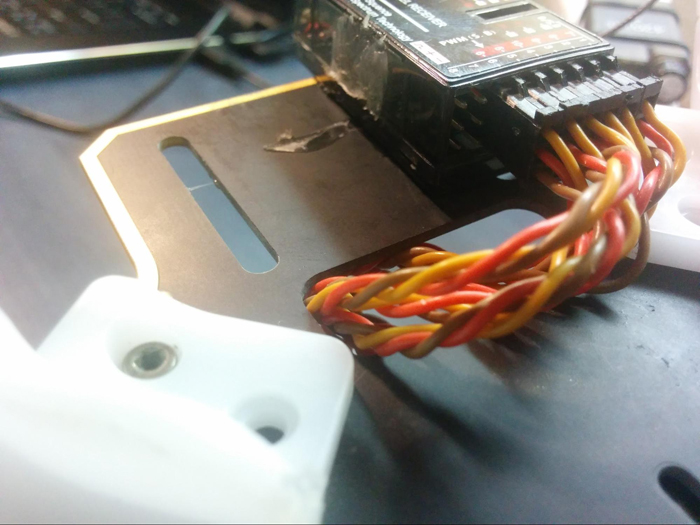
圖9:連接接收器的PWM訊號線 請注意線纜的插入方式,橙色導線應位於頂部。
PWM訊號線應按以下方式連接(左側的通道編號在接收器上,右側括弧中的字母位於NAZA的背面):
- 通道 1 = 副翼 (A)
- 通道 2 = 升降副翼 (E)
- 通道 3 = 加速 (T)
- 通道 4 = 舵 (R)
- 通道 5 = 飛行模式 (U)
- 通道 6 = 方向鎖定 (X2)
第7步:將ESC伺服線連至飛行控制器
還記得我前面提到的ESC的那根雙線伺服電線嗎?現在,我們將其連至飛行控制器。飛行器墜毀的一個常見原因就是ESC與飛行控制器的連接順序按錯誤,因此我們必須在首次就正確安裝該器件。
在NAZA-M Lite的正面,您會看到多列標有M1-M6的引腳,我們只需連接M1-M4。您必須根據下圖將馬達連至飛行控制器,其中紅色機臂是四軸飛行器的前方。比如,右前ESC的伺服線必須連接到M1;左前ESC伺服線必須連接到M2,依此類推,按逆時針方向轉。
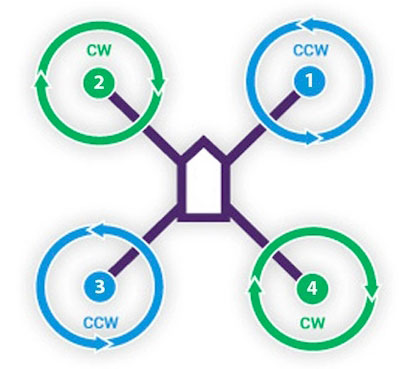
圖10:NAZA的馬達編號定義
第8步:將頂板安裝到機臂上

圖11:機架的側視圖
我們已經將所有電子裝置都安裝在底板上了,現在應先從頂板開始將頂板和底板與機臂固定在一起。您可能已經注意到,DJI F450機架包含兩個紅色機臂和兩個白光機臂。我們可以將兩個紅色機臂放在四軸飛行器的前部,將兩個白光機臂放置在四軸飛行器的後部,當四軸飛行器在空中時,我們就會知道其前方是哪個方向。
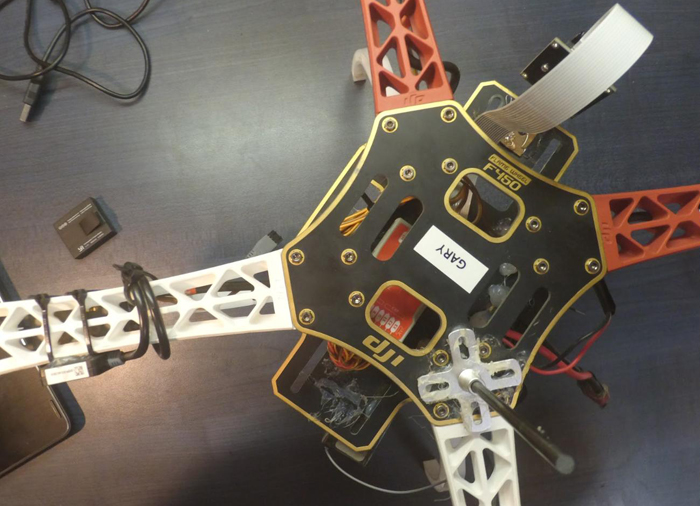
圖12:每個機臂都用螺栓固定到頂板上
請用機架附帶的螺栓將機臂固定到頂板上,每個機臂用四個螺栓。請確保兩個紅色機臂位於ESC伺服線與M1和M2相連的NAZA側——這將是四軸飛行器的前部。下一步之後,您會看到每個機臂實際上都“夾在”頂板和底板之間。
第9步:安裝支腿和底板

圖13:機架所用的支腿
F450 ARF套件附帶的白光支腿(如上圖所示)負責在起飛和降落期間保護四軸飛行器下方的重要電子裝置。請用機架附帶的長螺栓連接支腿。支腿應位於機臂正下方,安裝時螺栓要穿過支腿、底板,進入機臂底部。請確保ESC電源線從機臂底部弧形部分下方的機架中伸出。請為每個機臂重複此過程。
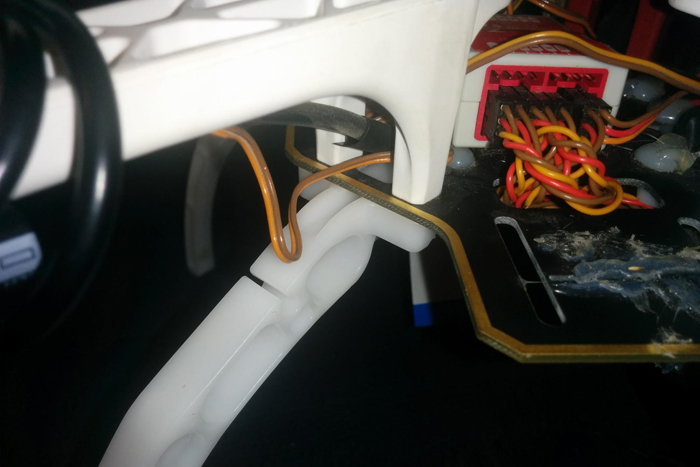
圖14:位於機臂正下方的支腿。請注意,ESC線穿過機臂空間的方式。
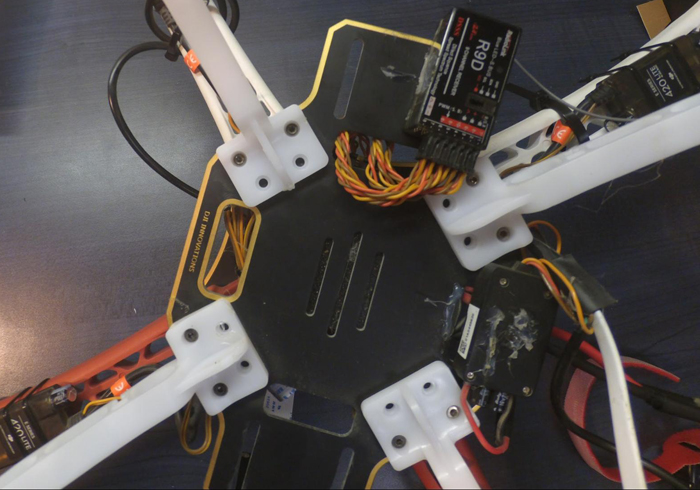
圖15:支腿如何固定在機架底部