
Arduino探索漫遊車1—底盤

目錄
第三步:懸架模組和馬達模組
類似於製作控制臂的方法,我們還需要製作懸架和馬達模組。我們要保證這兩部分的孔精准對齊,所以會先夾緊之後再用螺栓進行固定。這可能是最難製造的零零件了,所以在測量孔的位置的時候一定要格外謹慎。
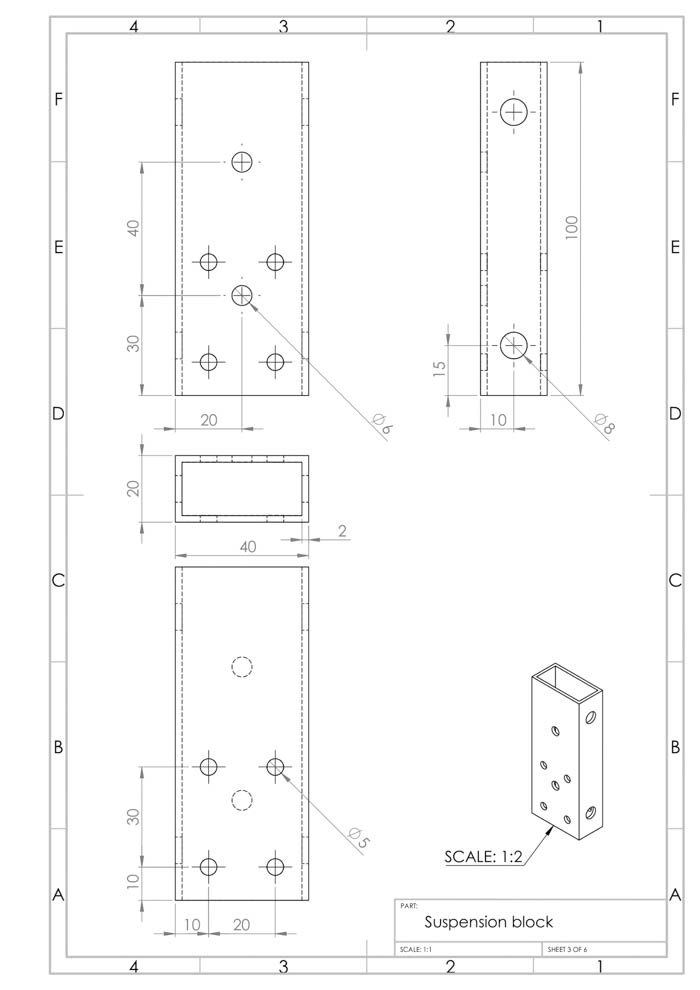
圖11:懸架模組圖紙(比例1:1)
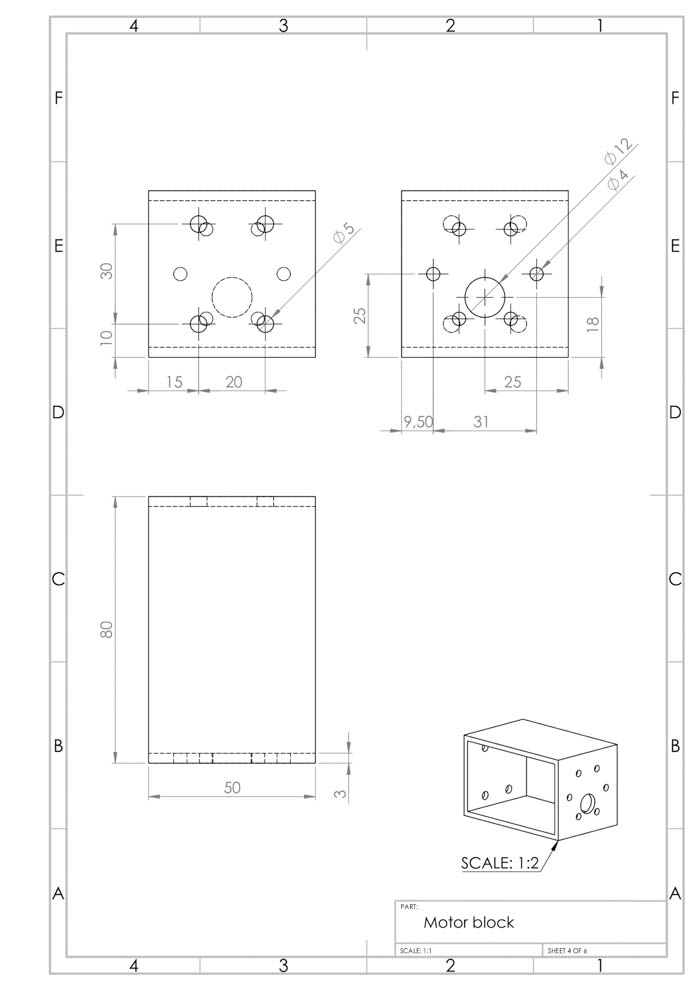
圖12:馬達模組圖紙(比例1:1)
3.1 首先,您需要在懸架模組上標記出所有需要打孔點的位置。我們將在兩側鑽出通孔,所以只用在一側進行標記就可以了。就像我們之前做的那樣,測量出所有尺寸,用釘子和錘子敲出導向的凹痕,然後鑽出2.50mm的小孔。

3.2 接下來,我們要對插入軸承軸的孔進行擴孔。我建議這個過程分兩步來完成:首先,鑽出一個5mm的通孔—穿過對面一側—這樣最後所有的孔都會對齊。然後再擴孔至8mm。

3.3 現在,我們需要將懸架模組和馬達模組夾在一起,這樣就可以把用於連接的螺栓孔對齊。確保兩種模組的邊緣對齊,並且懸架模組位於馬達模組的中間。

3.4 現在,用5mm的鑽頭對其中兩個小孔進行擴孔。鑽頭一直穿過懸架模組的對面一側以及馬達模組的頂部一側。

3.5 卸下夾具,使用兩個M5螺栓將模組固定在一起。再強調一下,保證兩個模組的邊緣精准對齊,這一點非常重要。然後,用5mm鑽頭對剩下的孔進行擴孔。完成之後,拆掉螺栓並敲掉馬達模組內的毛刺。現在,您就已經有了可以進行精准裝配的馬達模組和懸架模組了。就像製作控制臂那樣,我建議對它們進行標記,這樣您組裝機器人的時候就知道哪對是配套的了。

3.6 懸架模組遺漏的最後一個部分是那些用於安裝減震元件的孔。我們在較早的時候用2.50mm的鑽頭鑽出了這些孔,所以現在只需要用將其擴孔至6mm即可。一定要注意,只需要對懸架模組的一側鑽孔!這一步完成後,懸架模組就已經完成了,您可以暫時把它放置在一邊。

3.7 取出馬達模組,在6個將用於安裝馬達的前孔中標記出2個,然後,用3mm的鑽頭鑽出這些標記的孔。

3.8 接下來,我們需要鑽出用於安裝馬達的其他四個孔。保證它們對齊是非常困難的,但是我們有一個訣竅:使用Pololu 37D底座。這個底座已經帶有鑽好的孔了!所以我們可以使用幾個M3螺栓來將其與馬達模組進行固定,現在,我們就有了用於鑽孔的範本了。
3.9 使用3mm鑽頭鑽出剩下的四個孔。

3.10 卸下範本,用4mm鑽頭進行擴孔。有些孔可能並沒有精准對齊,那我們可以把尺寸精准度放寬一些,增加1mm的活動空間。

3.11 測量並鑽出用於馬達軸的孔。請在測量的時候格外小心,保證這些孔位置的精度!開始用3mm鑽頭然後逐漸擴孔至我們需要的直徑12mm。像上文一樣,您可能需要使用圓銼對孔進行一些校正,直到達到與馬達的精准裝配。
3.12 最後一步是挫掉這些馬達模組的角,這樣的話當車輪行動的時候就不會造成干擾。只需要挫掉幾毫米就可以了。您可以安裝馬達並連接車輪來進行測試。如果運行順利,那您可以繼續進行下去。
將整個過程重複6次,您就可以進行下一部分內容了。我保證所有最難的部分已經完成了,從現在開始,將會是比較輕鬆的工作。
當然我們還遠沒有完成整個項目!我們還需要把減震器添加到我們剛剛製作的懸架模組的框架上。然後,我們將用所有零件進行底盤的組裝!