
Arduino探索漫遊車1—底盤

目錄
背景簡介

很長一段時間以來,我一直在尋找一種能夠行走於崎嶇地形,並且使我不需要從舒服的椅子上站起來就可以對真實世界進行探索的機器人。有很多種機器人可以作為組裝的配件,但是當我在尋找一款好用的六輪機器人時,一個問題不斷出現:這些機器人尺寸都不夠大。當然,有些已經比較接近理想尺寸了,比如Dagu Wild Thumper,但至今沒有找到我所心儀的。因此,我決定自己來設計產品,在CAD上花費了大量時間,然後又在我的車程式館裡花費了更長的時間,現在,我終於可以在這裡向您展示ArduRover:一個全金屬材料,帶有獨立車輪懸架的六輪越野機器人!
硬體
- 48x KFL-08 球形軸承
- 6x 1:8 RC 越野車輪和輪胎
- 6x 1:8 RC 車吸振器
- 6x Pololu 37D 30:1 馬達
- 6x Pololu 12 mm 六角合適器,適用於6mm軸
- 1x Pololu 37D 馬達支架(用作模框)
- 6x 12 mm ~ 17 mm 的六角合適器
- 10mm 螺紋杆(1米)
- 8mm 螺紋杆(3米)
- 多種鋁型材,M型螺栓和螺母(詳情請見“製造底盤”章節)
工具
- 電動工具: 鑽床(必需),帶鋸(可選)
- 鑽頭[mm]: 2.50, 3.00, 4.00, 5.00, 6.00, 7.00, 8.00, 9.00, 10.00, 12.00
- 手動工具: 鋼鋸,錘子,螺絲刀,扳手,砂紙,銼刀等。
這個“巨獸”的尺寸為60 x 50 x 25 cm (23.6 x 19.7 x 9.8 in),不負載任何電子裝置或電池時重量為9.5 kg(20.9 lb)。它具有六個大型1:8 RC車輪,以及六個帶有30:1變速箱的高檔Pololu馬達。可為我們提供(理論上)最高10Kph(6mp)的時速。每個車輪都有獨立的懸架,因此機器人可以在非常崎嶇的地形上行動。此外,如果您想自己來完成製作,唯一需要的電動工具就是鑽床—該專案不需要焊機或角磨機!但首先我們還是先來快速瞭解一下該設計的主要功能特點。
設計方案
在每個專案的開始,您應該盡可能簡潔的寫下您的最終目標。這樣,您就可以有一個客觀的參照,來告訴您所做的工作是否可以真正的幫助您完成起步。所以我們首先就來用一句話簡單地總結這個專案的目標:
制造一个可以自由探索自然环境的大型、敏捷的六轮机器人。
很好,現在我們就知道確切的目標了。接下來,我們需要對機器人進行設計。幸運的是,如今有許多種類的CAD程式可供使用,可以極大的加速這一部分的進程。我使用SolidWorks 2016完成了機器人設計,但如果您沒有這個軟體的許可證,不要擔心,您可以在我的GitHub裡獲取所有零件的設計圖。
設計類似這樣的機器人時,您要做的第一件事就是製作類似“功能演示”的東西:一種僅僅演示最終組裝的產品如何工作的模型。在這一點上,您不必考慮那些之後會用到的精確的零零件,現在比較重要的是先得到機器人所有機械化工作的總體思路,然後創建出證明其可行的模型。
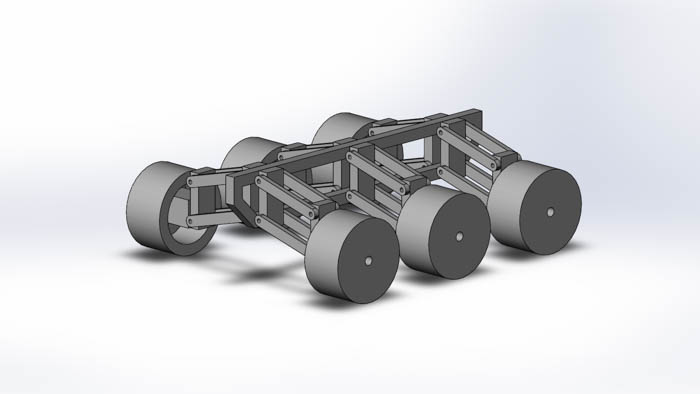
圖1:展示模型
從上圖中,您可以看到整個模型。在該模型中,所有零件都沒有被指定是哪種材料製成,也沒有零零件的相關細節。也沒有類似於碰撞這種物理約束,所有零零件都只是安裝在相應位置。也就是說,即使您按照這個模型來完成所有制作過程,也並不能保證製作出的機器人可以運行。但是,我們可以測試出這種類型的懸架表現如何,這恰好是整個專案中最關鍵的部分。還記得我們上文中所定的目標嗎?這台機器人需要能夠在一個自然環境中行動,而不僅僅是在乏味的、平坦的、空無一人的街道上。在自然環境中,將會有岩石,成堆的塵土和樹枝,所以懸架必需足夠堅固來對應這些狀況。
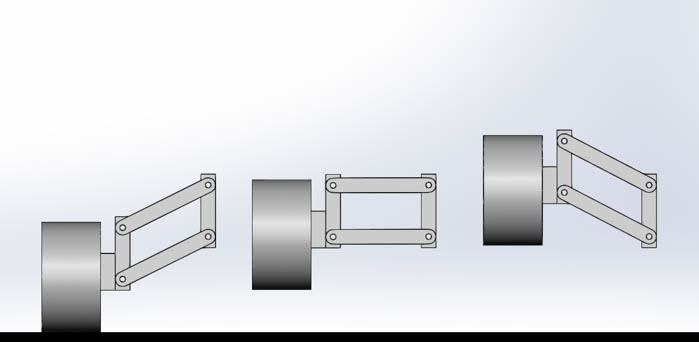
圖2:懸架細節
我決定使用的懸架類型基本和當今您所能找到的大多數汽車所用的一樣。它類似於被稱為雙橫臂懸架,可以確保每個車輪的位置相對於其他輪子高或低,車輪的軸線都始終平行於地面。這就可以使車輪保持與地面之間的最大接觸面積。此外,這種懸架看起來相當的酷。
既然我們已經對機器人會如何表現有個大概的瞭解了,我們就將開始逐步用現實世界中可以獲取的實際零零件來替換演示模型中的所有虛擬零件了。首先,我們需要替換的是那些我們不能進行修改的零件,比如馬達、車輪和減震器。
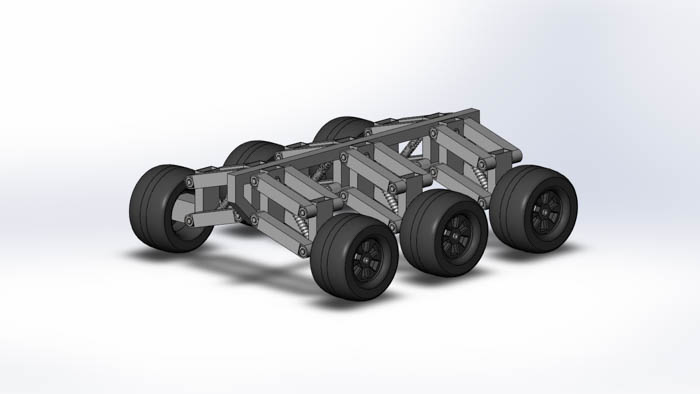
圖3:添加了車輪、軸承和減震器的模型
接下來,我們需要找到製造底盤的材料。既然機器人將要在自然環境中行動,並且尺寸龐大,那麼塑膠以及木頭似乎都不是好的選擇。所以我們決定使用金屬來製造所有的零件。通常,我們有兩種選擇:
- 鋼或鐵。優點是可以很容易的將其進行焊接,所以不會有太多鑽孔。如果透過正確的方法進行焊接,那麼即使在惡劣的環境中,連接點也會十分穩固。而主要的缺點就是材料過重。
- 鋁。在我們的實際應用中,它的性質幾乎完全與鋼相反:鋁很輕,但是很難進行焊接,只有透過使用非常昂貴的裝置才能完成焊接。如果我們選擇了鋁,所有零零件需要透過螺栓進行連接。
這樣看來最終的選擇要取決於重量了—如果所有的鋼零件都太重,那麼也許我們就必須使用鋁了。幸運的是, CAD軟體在這裡也給我們提供了很大的便利:只需要簡單的設定所有零零件的材料,我們就可以獲取重量的估計值。太神奇了!所以,結果是什麼呢?如果我們使用鋼的話,大約16 kg (或者 35 lbs)。我甚至不打算費心對減震器在這種情況下的表現進行類比—它不可能承受這樣的負載運行太久。所以我們決定使用鋁。這樣就可以將預估重量減至“僅僅”8kg(17.5 lbs),是鋼制零件的一半。這肯定比我見過的絕大多數DIY機器人都要重,但已經在合理範圍內了。在以下的模型反覆運算中,我們可以將懸架中的所有虛擬零件替換為我們可以實際製作的零件。
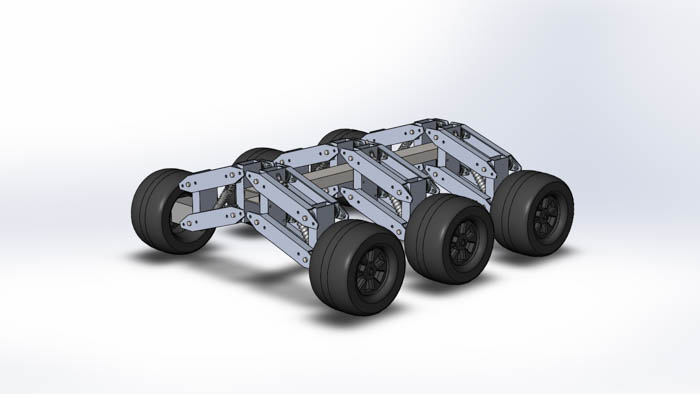
圖4:具有真實懸架零件的模型
好了,我們已經有進展了,現在開始看起來像一個真正的機器人了!設計過程的最後一步是完善所有的細節,比如減震器組件。另外,我們還需要弄清楚用什麼來替代中間的連接條。最後,我決定使用一些10mm的螺紋杆來替代,這樣可以使我們能夠完全按照我們的要求來設定車輪之間的距離。除此之外,我們還需要一些空間來安裝電子裝置。您可以在下圖中看到相關內容。
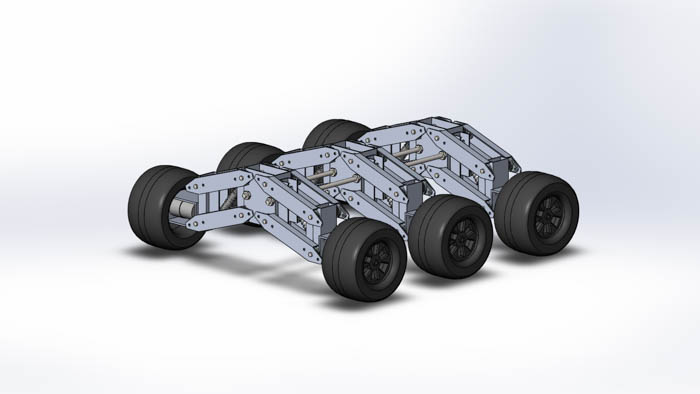
圖5:完成所有細節設計的最終模型
所以,模型已經建立完成了!接下來,我們將會把設計圖紙列印出來。現在到了去車程式館用我們的雙手進行實踐的時候了!