
Arduino探索漫遊車1—底盤

Table of Contents
第一步:控制臂
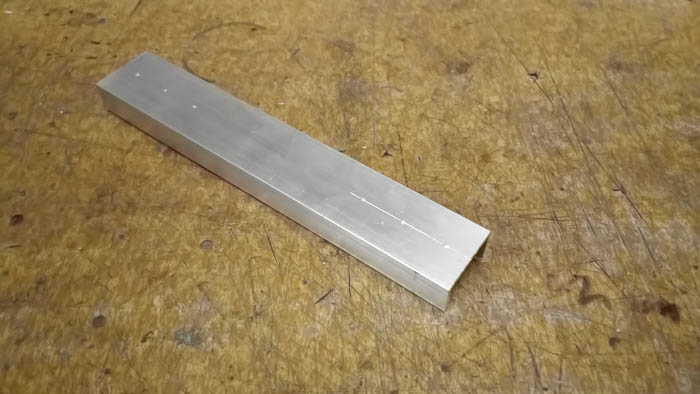
我們首先製造的是控制臂。製造過程很簡單,只需要一個兩端各帶有三個孔的U型材即可,這些孔用於連接軸承。為了使所有孔對齊,我強烈建議將控制臂成對製作。還有一點需要注意的是—事實上,鋁型材很軟,實際上比很多木材都要軟。雖然這意味著對它很容易進行鑽孔和切割,但同時也說明了這種材料在加工過程中很容易產生劃痕。
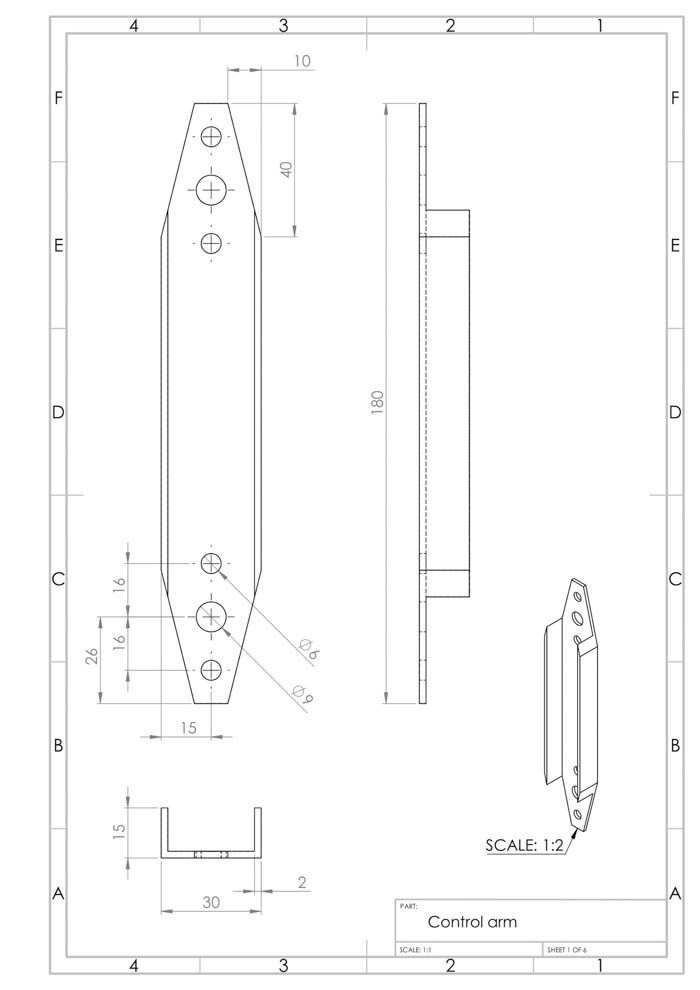
圖9:控制臂圖紙(比例1:1)
1.1 俗話說“三思而後行”。第一個需要測量的是孔的位置。我建議使用一些鋒利的東西,比如開箱刀,在鋁板上畫線。因為鋼筆或記號筆永遠都無法達到像鋒利的刀那樣的精准度。

1.2 接下來,您需要將孔所在位置的精確點標記下來。一個尖銳的釘子和一個錘子就足以完成這個過程。在鋁板上打一個小凹痕,這樣的話當您開始鑽孔時,鑽頭就會有一定的導向,孔也就會精確的打在我們期望的位置。
1.3 現在,取一個小口徑鑽頭,鑽出剛剛標記過的6個孔。2.50mm的鑽頭應該剛剛好。這不是孔的最終直徑,我們現在僅用來對齊。

1.4 在這一步中,我們將使用一些C型夾將兩個U型材進行固定。拿出剛剛鑽過孔的U型材,然後再拿出一個沒有孔的新的U型材,將它們緊緊的夾在一起。盡可能使U型材的邊緣精准對齊。您可以使用另外一個U型材作為參考平面。

1.5 現在,我們已經有兩個盡可能對齊的U型材了(一個帶孔,一個不帶孔)。然後,在U型材的一端鑽兩個5mm的孔,就像圖片所示那樣。完成之後,將那些不可避免地會出現在另一側的毛刺敲掉。

1.6 卸下臨時夾具,使用一些M5螺栓將U型材固定在一起。在我們鑽剩餘的孔的時候,U型材要保持對齊。請盡可能的將螺母擰緊,並同時注意保持U型材對齊。如果邊緣開始出現錯位,您需要鬆開螺栓,然後再次將U型材對齊。

1.7 現在,使用6mm鑽頭鑽開其餘孔。

1.8 用9mm鑽頭鑽出中間孔,然後敲掉另一側的毛刺。拆下螺栓,用6mm鑽頭對之前有螺栓的兩個5mm孔進行擴孔。瞧,兩個全新的(雖然可能有一定的劃痕)控制臂產生了!因為它們是一起完成的,我建議您對它們以某種方式做一下標記,這樣之後就不會和其它控制臂混淆了。

1.9 最後一步是鋸掉所有的角。這時候帶鋸就派上用場了。如果您身邊沒有帶鋸的話,也可以徒手完成。但是由於您需要鋸掉96個角,然後用銼刀完成所有的切割,所以可能需要花費一周的時間才能處理完。另外,處理之後這些表面看起來也不可能很完美。

整個過程重複12次,您就會有足夠的控制臂來製造一個ArduRover了!