
基於Raspberry Pi的DIY無人機第3部分–FPV設定指南
本文是我們Raspberry Pi四軸飛行器系列的最後一部分。有關本課程的其他部分,請參考《DIY Raspberry Pi無人機:機械構造–第1部分》 和 《DIY Raspberry Pi無人機第2部分-Naza-M Lite指南》。在本課程中,我們會指導您如何設定FPV。成功設定後,四軸飛行器的即時視訊流透過Wifi從Raspberry Pi傳輸到行動裝置上。本課程需要用到安卓手機,因此請準備一部可用的手機。我們還將為無人機安裝螺旋槳,並在文章末尾提供一個飛行前檢查清單,以確保飛行的安全成功。
飛行測試視訊:
航拍視訊(四軸飛行器拍攝):
硬體
- 第1部分組裝的四軸飛行器
- 第1部分中的螺旋槳
- 安卓手機
- MicroB USB 資料線
軟體
工具
- 包含螺旋槳擰緊器的DJI Flamewheel 450套件
- 運行Windows系統的電腦
設定安卓手機完成FPV
第1步:選擇Raspberry Pi的FPV實現方式
無人機上Raspberry Pi的視訊透過WiFi熱點發送到Android手機。目前,我只總結了如何在Android手機上設定FPV視訊流。承載WiFi熱點的方式有三種:
- 手機和四軸飛行器都連至地面路由器
- 您可以使用射極功率較大的WiFi路由器,這意味著訊號覆蓋的範圍更大。然而,該方案最大的缺點是,飛行時您得帶著這個路由器,並且路由器還得需要單獨電源,這又增加了飛行時必須攜帶的裝備數量。
- 手機連至Raspberry Pi上承載的WiFi熱點
- 該解決方案似乎很理想,因為它可以與任何觀察裝置一起工作,不管是否能夠承載WiFi熱點。然而,根據我的經驗,這種方法的缺點是很難在WiFi無線網卡上啟用接入點(Access Point)模式。
- Raspberry Pi連至手機承載的WiFi熱點
- 手機上的WiFi熱點不需要WiFi路由器和額外的電源,確定WiFi熱點變得非常容易。大多數安卓手機都可以在幾分鐘內創建一個WiFi熱點。
第2步:在安卓手機上設定WiFi熱點
範例中使用的是運行Android 6.0.1的Nexus 5手機。其實,系統是Android 2.2及以上版本的任何手機(現在的所有手機幾乎都是)都應支援WiFi熱點功能。
注:根據手機製造商的不同,下文顯示的具體步驟功能表可能會有所不同。
要設定WiFi熱點,請先打開設定應用程式。您應該會看到與下圖類似的菜單。
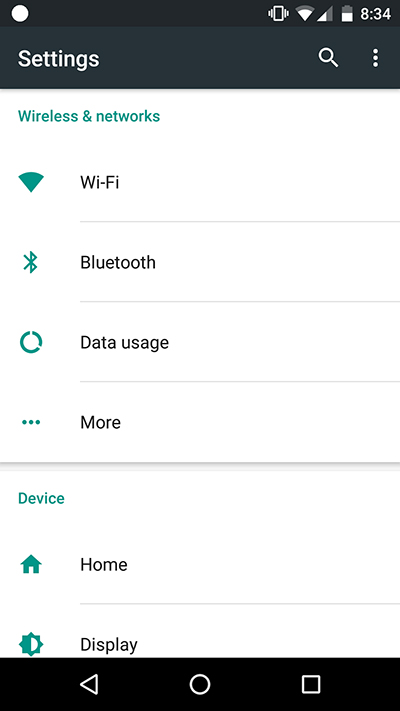
圖1. 安卓設定菜單
在Wireless & networks(無線和網路)功能表下,按一下More(更多)選項。同樣,您應該會看到與下圖類似的菜單。
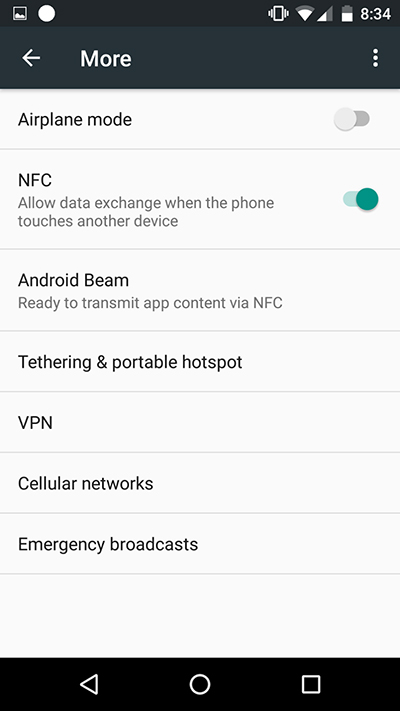
圖2. 網路設定
進入Tethering & portable hotspot(網路共用和可擕式熱點) 功能表,您會看到以下選項。在此功能表中,按一下Setup Wi-Fi hotspot(設定Wi-Fi熱點),開始配置WiFi熱點。
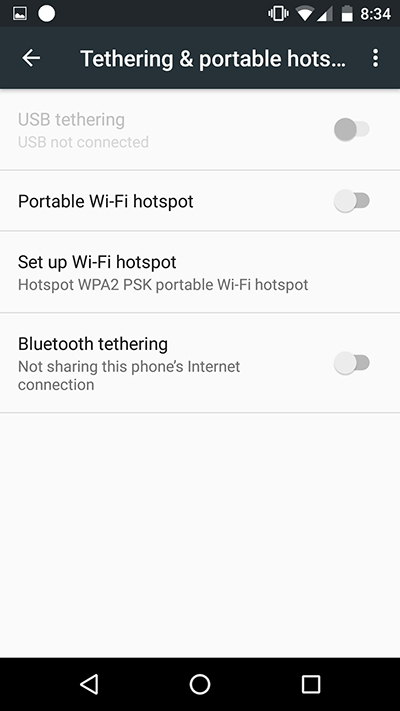
圖3. 熱點菜單
現在,我們填寫相應的欄位來配置手機WiFi網路的名稱、安全性和頻段。名稱請自行定義。
為了確保網路只讓我們的無人機和自己訪問,我們將安全性設定為“WPA2 PSK”,將密碼設定為“deviceplus”。
最後一個欄位Select AP Band(選擇AP頻段)非常重要。該欄位指定WiFi熱點使用的頻段。我們有兩種選擇:2.4 GHz頻段和5 GHz頻段。我們應使用5 GHz頻段,這一點非常重要。這是因為我們的RC接收器(本系列課程第1部分安裝的裝置)用的就是2.4 GHz頻段,如果在同一頻段上同時運行熱點和RC接收器會增加相互干擾的機率,從而使您失去對無人機的控制。
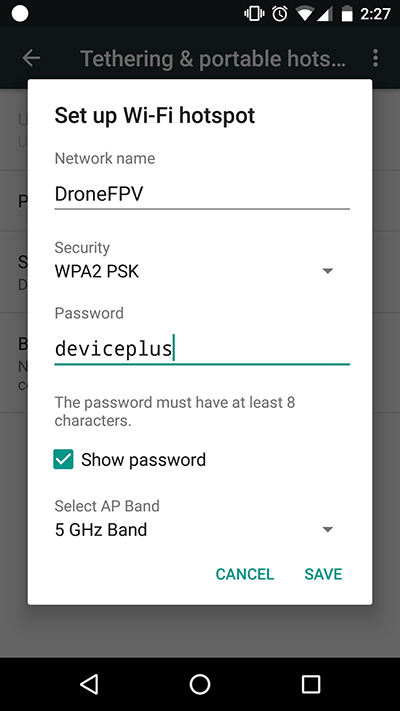
圖4. WiFi熱點配置
所有欄位輸入完成後,按一下保存,WiFi熱點配置完成!現在,只要點擊Portable Wi-Fi熱點右側的滑標(請參見圖2),就可以啟用該熱點。
第3步:安裝Raspberry Pi Camera Viewer應用程式
我們還需要一個特殊的應用程式來從相機傳入手機的視訊流顯示出來。本文中使用的應用程式是EffiSoftRaspberryPi Camera Viewer。請從以下網址(Google Play商店)下載該應用程式並將其安裝到您的手機上:https://play.google.com/store/apps/details?id=pl.effisoft.rpicamviewer2。
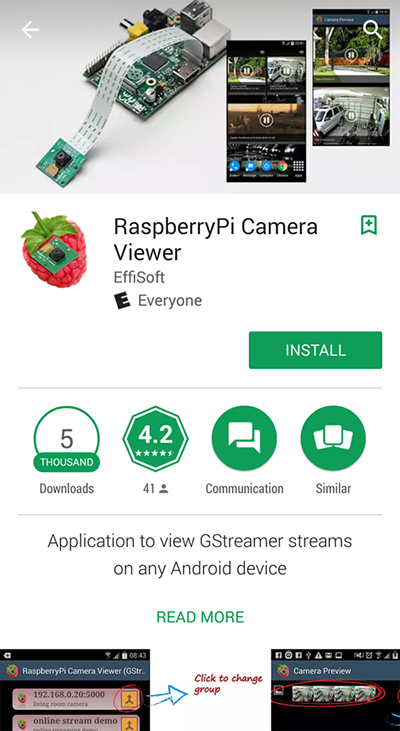
圖5. Google Play上的RaspberryPi Camera Viewer
第4步:設定Raspberry Pi Camera Viewer應用程式
手機上安裝Raspberry Pi Camera Viewer之後,就要設定該應用程式了。首次啟動該應用程式後,您會看到一個近乎空白的介面,如下圖所示。
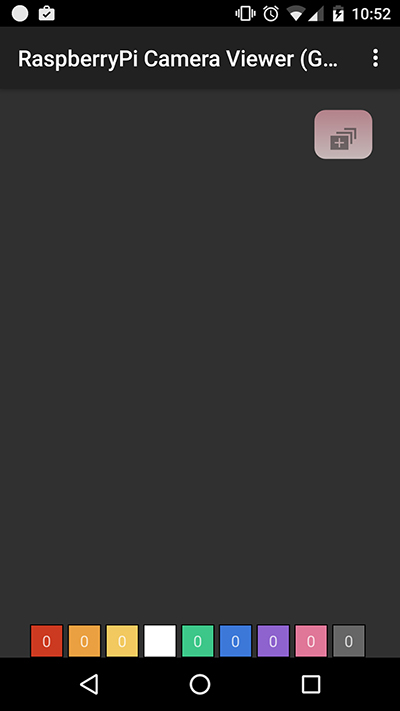
圖6. 首次打開live streaming程式
開始根據我們的需求設定該應用程式,請按一下右上角附近的(+)按鈕。透過此按鈕我們可以創建一個新的設定檔。按一下該按鈕,系統會彈出一個通道編輯功能表。

圖7. 預設的通道編輯介面
我們需要更改許多選項。首先,請勾選Enable advanced mode旁邊的核取方塊以訪問更多設定。然後將名稱更改為QuadcopterFPV或類似的描述性名稱。現在,我們必須進行最重要的一個設定——通道描述。通道描述的作用是告訴應用程式如何對傳入的視訊流進行解碼(如果您想瞭解更多資訊,請參閱GStreamer Pipeline)。
請將包含以下內容的欄位:
tcpclientsrc host=0.0.0.0 port=5000 ! gdpdepay ! rtph264depay ! avdec_h264 ! videoconvert ! autovideosink sync=false
替換為:
udpsrc port=9000 ! gdpdepay ! rtph264depay ! avdec_h264 ! videoconvert ! autovideosink sync=false
這兩個通道描述之間的唯一區別是我們的新通道描述用的是UDP而不是TCP。我們使用UDP是因為其視訊延遲較少,且視訊流可以更好地處理丟訊框或資訊丟失狀況。
我們必須配置的最後一個選項是Enable application extra features。請勾選該選項旁邊的核取方塊。這能夠讓我們在飛行過程中對視訊畫面截圖,這很有用。
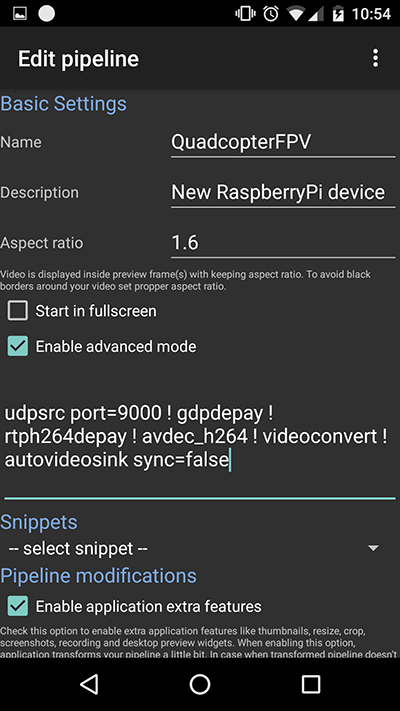
圖8. 最終設定
調整所有設定後,滾動至應用程式底部,然後按一下SAVE按鈕即可保存所有更改。在接下來的步驟中,我們將設定Raspberry Pi連結至熱點,用於相機以及傳輸視訊等功能。
為FPV設定Raspberry Pi
為了簡化Raspberry Pi的配置,我創建了一個Raspbian鏡像,可以輕鬆為FPV安裝Raspberry Pi。您可以在此處下載我自訂的最新版Raspbian鏡像:https://github.com/brenton311/drone-files/releases/download/v0.1/image.zip。
要安裝此鏡像,您必須解先提取zip檔,然後按照Raspberry Pi上最新的作業系統說明進行操作:https://www.raspberrypi.org/documentation/installation/installing-images/。
安裝完成後,裝上電池,Raspberry Pi就會將視訊流傳輸到手機上(Raspberry Pi大約需要40秒鐘才能完成啟動,因此視訊不會立即顯示在螢幕上)。
試飛/如何飛行無人機
第1步:學習每個控制杆和切換的用途

圖9. 射極器上標記出的相關聯的控制杆
- 油門(控制杆1:垂直軸)
油門控制馬達的速度。油門越大,馬達旋轉越快;油門越低,馬達旋轉越慢。通常,油門從零加到一半時,四軸飛行器會懸停在空中(不向上或向下行動)。油門低於50%時,飛行器會下降;油門高於50%時,飛行器會上升。
- 方向舵/偏航杆(控制杆1:水平軸)
方向舵杆控制四軸飛行器在偏航軸中旋轉的速率。當方向舵杆在中心時,四軸飛行器不會旋轉。方向舵杆向右,四軸飛行器將順時針旋轉;方向舵杆向左,四軸飛行器將逆時針旋轉。
- 升降舵/俯仰杆(控制杆2:垂直軸)
升降舵杆控制四軸飛行器沿俯仰軸偏轉的角度。將升降舵杆推離自己,無人機會向前傾斜;將升降舵杆拉近自己,無人機會向後傾斜。
- 副翼/旋轉杆(控制杆2:水平軸)
副翼杆控制四軸飛行器沿旋轉軸偏轉的角度。副翼杆向右,無人機會向右傾斜;副翼杆向左,無人機會向左傾斜。當升降舵杆和副翼杆都歸於中心時,四軸飛行器保持水平。
- 方向鎖(控制杆3)
這個三向切換可以在三種方向鎖定模式之間切換(斷路、航向鎖定和返航點鎖定),我們在之前的NAZA 配置步驟中已經討論過了。
- 飛行模式切換(控制杆4)
這個三向切換可設定飛行模式。我們為能夠在三種飛行模式中切換而配置NAZA:GPS ATTI, ATTI, and FAILSAFE(GPS姿態、姿態和故障保護)。我們已經在NAZA 配置步驟中討論了每種飛行模式的功能。
第2步:創建一份飛行前檢查清單
飛行四軸飛行器時,會發生許多意外。為了防止出現低級錯誤,我建議您製作一個飛行前檢查清單。駕駛四軸飛行器前,我要檢查以下項目:
- 確保螺旋槳已擰緊且安裝方向正確
- 確保電池已經充滿電
- 檢查無人機是否存在任何物在·損壞(比如機身開裂、導線未連等)
- 確保射極器的電池電壓符合要求
- 確保您所處的區域能夠合法、安全地駕駛四軸飛行器
- 請務必徹底瞭解您的四軸飛行器、其飛行特性、控制方式以及出現問題時的處理方法
- 等待NAZA LED顯示綠色,再起飛四軸飛行器。
第3步:學習基本飛行技巧
- 請始終讓將四軸飛行器的前端指向遠離您的位置(如果需要,請使用方向鎖定):如果未啟用方向鎖定,那麼所有旋轉和俯仰命令都會以四軸飛行器的指向方向而定。無法分辨四軸飛行器的指向可能會導致墜毀,因為您的命令將不會按照您認為的執行。
- 油門加到50%時懸停:理想情況下,四軸飛行器的推力重量比為2:1,因此油門加到約50%時會懸停。如果您發現四軸飛行器懸停時的油門數值顯著偏高(比如大於70%),那麼可能是四軸飛行器太重了——請嘗試減少負載或使用功率更大的馬達。
- 切勿過度反應:四軸飛行器上的控制器都很靈敏,而且四軸飛行器可以飛的很快。如果未按預期方向飛行,請緩慢而安全地小幅調整旋轉杆及俯仰杆。
第4步:請始終安全地駕駛四軸飛行器[重要!]
- 請始終遵守您所在地區與無人機(無人航拍機)相關的所有適用法律!DevicePlus和本系列文章的作者對由於組裝或使用此無人機造成的人員或財產損耗不承擔任何責任。無人機可能會非常危險!請合法、安全地操作您的無人機。
- 如果您是新手,請做好無人機墜毀的心理準備。
- 切勿過度消耗電池電量。
- 請在遠離人員、汽車或其他建築物的空曠區域(田野、大型公園)飛行。
- 請勿在機場附近飛行(請諮詢適用法律,以瞭解機場的禁飛半徑)
- 切勿讓四軸飛行器脫離視線範圍或在夜間飛行
第5步:電池充電
嘗試為電池充電之前,請參閱本系列第1部分中有關電池規格和正確保養的重要資訊:《DIY Raspberry Pi無人機:機械構造–第1部分》。您也可以點擊此處查看有關LiPo電池的指南。
配置和使用LiPo電池充電器的確切步驟因每個充電器而異,但是通常必須:
- 確保將充電器設定為LiPo模式(許多充電器支援多種化學成分的電池)
- 將電池電壓設定為3S(如果使用其他電池請做相應更改)
- 將電池容量設定為3300mAh(如果使用其他電池請做相應更改)
- 充電電流可以保持預設值(通常為1C)
- 將電池引腳按照正確極性連至充電器
- 將電池的平衡導線連至平衡充電器
- 給電池充電時,請遠離任何易燃材料(建議在室外充電)
- 充電時請監控電池,以確保其不會膨脹、冒煙或劇烈發熱。如果發現有任何這種跡象,請立即停止充電並將電池移至遠離易燃材料的室外。
第6步:安裝螺旋槳
與四軸飛行器的順時針馬達和逆時針馬達一樣,螺旋槳也有順時針和逆時針之分。每個順時針馬達必須於順時針螺旋槳配對,而逆時針馬達必須與逆時針螺旋槳配對。馬達的方向可以透過查看馬達側面的箭頭來確定。螺旋槳的方向可以透過查看螺旋槳中間的顏色來確定。中間是黑色的螺旋槳與順時針馬達配對,中間是銀色的螺旋槳與逆時針馬達配對。

圖10. 逆時針螺旋槳(上)和順時針螺旋槳(下)
要將螺旋槳安裝在馬達上,只需將螺旋槳中心的底部(您會看到一個螺紋孔)裝在馬達軸上。然後,用螺旋槳擰緊器固定馬達,並沿與旋轉方向相反的方向旋轉螺旋槳,直到感覺到明顯的阻力。此時,請用兩根手指將螺旋槳固定在中心位置並防止其旋轉,然後用螺旋槳擰緊器旋轉馬達,鎖緊螺旋槳。
第7步:從萬向節上取下Xiaomi Yi相機
作為飛行新手,您墜毀四軸飛行器的幾率很大。四軸飛行器墜毀時可能會損壞元件。這就是為什麼我建議拆下萬向節和相機的原因——為了防止墜機時損壞昂貴的組件。
要從萬向節上拆下相機,請鬆開將相機固定在萬向節上的兩顆螺絲,然後將相機滑出支架,並取下相機。

圖11. 安裝在萬向節中的Xiaomi Yi相機(請注意兩個螺絲的位置)
第8步:從框架上卸下萬向節
要從框架上卸下萬向節,請從將其固定到框架上的四個螺栓上拆下螺母。同時,請確保萬向節不會掉落:一隻手握住萬向節,另一隻手鬆開螺栓。卸下四個螺母後,萬向節就可簡單地滑出框架。
第9步:校準指南針
校準指南針是一個可選步驟,該步驟可以讓四軸飛行器在GPS模式下更穩定。
請參考下面的分步校準指南[在GPS模式下]。
校準程式 – DJI Wiki
- 開啟射極器,然後打開自動駕駛系統!
- 快速將控制模式從手動模式切換到GPS ATTI,然後再切換回手動模式,來回6至10次,LED指示燈將持續亮黃燈。
- 水平放置四軸飛行器,圍繞重力線旋轉機器(大約360度),直到LED變為恒定綠色,然後進行下一步。
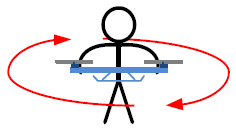
圖12. 水平放置四軸飛行器 / ©DJI Wiki
- 保持四軸飛行器垂直,圍繞重力線(大約360度)旋轉(機頭朝下),直到LED熄滅,這表示校準完成。
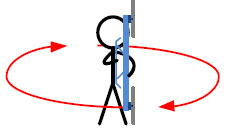
圖13. 保持四軸飛行器垂直 / ©DJI Wiki
- 校準成功後,自動退出校準模式。如果LED持續快速閃爍紅色,那麼表明校準失敗。切換一次控制模式切換,取消校準,然後從步驟2重新開始。
注:您無需在精確的水平或垂直表面上旋轉多旋翼飛行器,但水平和垂直校準之間至少要保持45°的差異。
重新校準的條件:
- 飛行區域發生變化。
- 多旋翼機械設定發生變化時:
a) GPS/指南針模組重新定位。
b) 添加/移除/重新放置了電子裝置(主控制器、伺服器、電池等)。
c) 多旋翼的機械結構發生變化。 - 如果飛行方向似乎正在發生變化(比如多旋翼飛行器無法“直線飛行”)。
- 當多旋翼飛行器旋轉時,LED經常指示異常閃爍。(如果這種情況偶爾發生是正常的)。
第10步:準備好進行第一次飛行
我們將透過四軸飛行器的首飛來測試四軸飛行器的每個元件是否正常工作,並讓您熟悉四軸飛行器的各個控制零件。飛行之前,請確保:
- 將無人機放置在距離您至少10米的大空地上
- 務必遵守上述所有安全預防措施
- 按照飛行前檢查清單實施檢查
- 將四軸飛行器的前端遠離您
- 放入電池
第11步:四軸飛行器的首飛
對於第一次飛行,請控制好四軸飛行器(射極器底角的兩個控制杆盡可能地保持在中心位置),然後緩慢加大油門,直到飛行器起飛。小心控制(切勿快速行動)四軸飛行器的油門,直到裝置高度達到約10英尺。當四軸飛行器達到10英尺高度時,將油門歸位到中點。
請緩慢地前後或左右行動四軸飛行器,從而熟悉升降舵和副翼的控制。隨著飛行技能的提高,您會意識到四軸飛行器的所有運動都是由升降舵、副翼和偏航命令控制的。
幾分鐘後,您可以使用副翼和升降舵操縱杆將四軸飛行器引導至您要著陸的位置。然後慢慢減小油門,直到四軸飛行器停在地面上。四軸飛行器下降時,您可能需要稍微調整下升降舵和副翼操縱杆,以便讓四軸飛行器著陸在預定的位置。
第12步:學習更多的飛行技術
本課程到此結束,以後的飛行技術您需要自己學習了。本文的目的是向您展示如何配置無人機,使其準備就緒進行飛行,而不是教您如何飛行無人機。如果您想要深入學習四軸飛行器的飛行技能,我建議您參考這裡的優秀指南。