
Arduino探索漫遊車1—底盤最終組裝

目錄
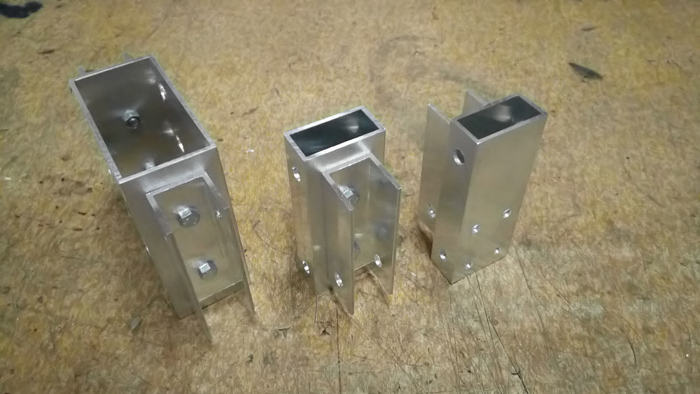
第五步:組裝底盤
此時,您應該已經有製造底盤所需要的所有零零件了,做得很棒!現在,我們可以開始組裝底盤了!有趣的是:如果您在第一次嘗試中完成了所有零零件的製作,那麼您已經總共鑽孔 570 個了。組裝底盤最簡單的方法是一次組裝一個懸架系統。如果您重複了三次組裝過程,那麼您可以把所有零零件組裝在一起了,最後您只需把所有的框架模組連接在一起即可。
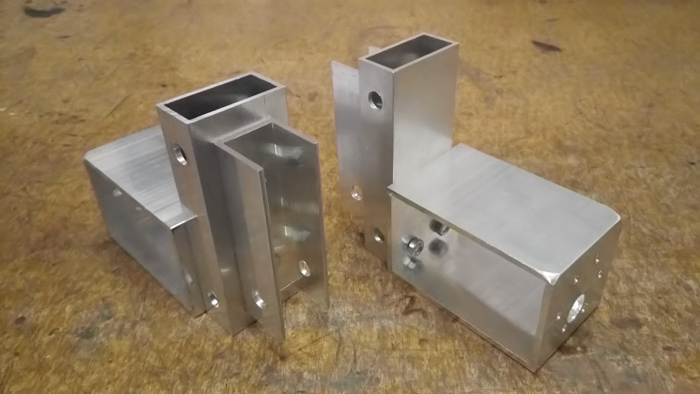
5.1 首先,將減震元件用螺栓固定在懸架或框架模組上,每個元件由兩個M5x8的螺栓連接。
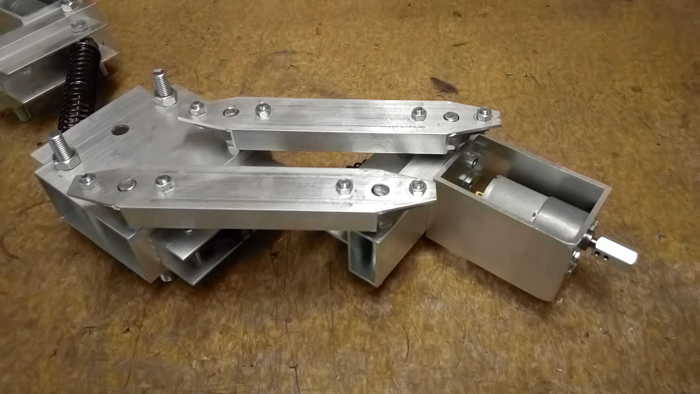
5.2 下一步是連接懸架模組和馬達模組。使用四個M5x8螺栓和4個M5螺母將它們進行連接和固定。我的建議是像圖中那樣從懸架的內部旋入螺栓。將所有的零件擰緊,並確保兩個部分對齊。
5.3 現在我們需要製作一些軸承軸。從8mm的螺紋杆切下8段,每部分長80mm。用銼刀和砂紙完成切割,這樣杆的末端不會殘留碎屑。然後,將螺紋杆插進框架和懸架模組上的8mm孔中,用M8螺母從兩側固定螺紋杆。擰緊螺母,但是不要用力過猛,不然可能會使鋁型材變形彎曲。

5.4 用6個M3x8螺栓將37D馬達安裝到馬達模組中。
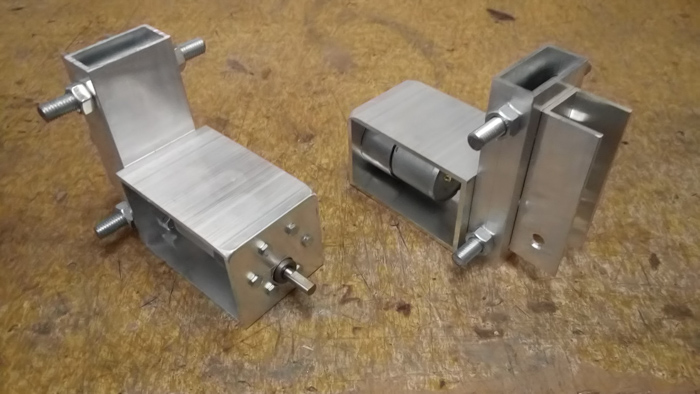
5.5 下一步是將Pololu 12 mm的六角合適器安裝到馬達軸上。

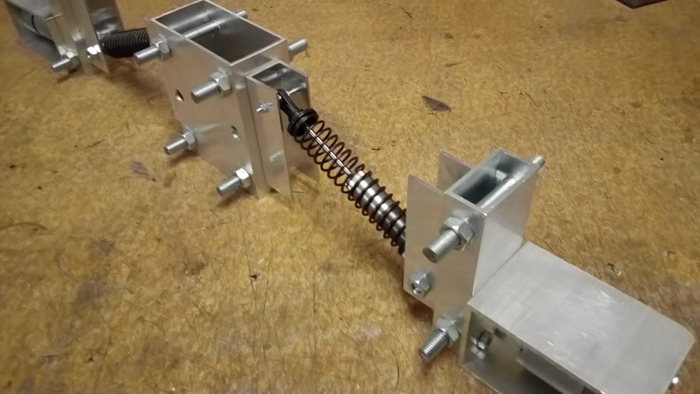
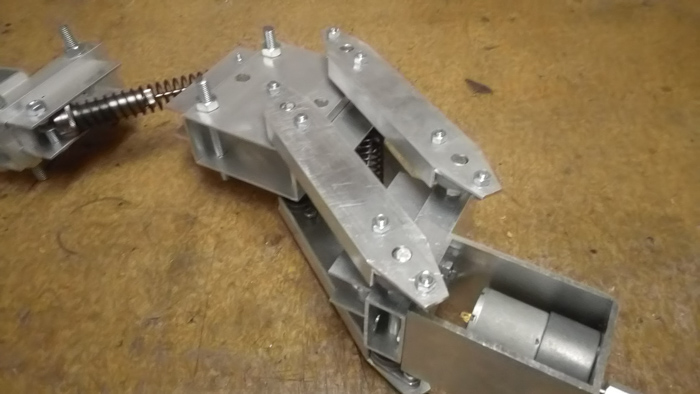
5.6 現在我們要安裝減震器了。這一步透過對每個減震器使用一個M7x30螺栓(在下端)和一個M3x30螺栓(在上端)來完成。使用兩個M3螺母來將減震器固定在上端M3螺栓的中間。
5.7 接下來是控制臂。將兩個KFL-08軸承分別安裝在每一個軸上。使用2個M5x12螺栓和兩個M5螺母來連接並固定軸承。

5.8 下一步我們來組裝懸架。鬆開每個軸承上的六角螺釘,將控制臂滑至軸上。將控制臂放置在可以自由行動而又不干擾馬達模組的範圍內,然後再擰緊軸承中的六角螺釘。
5.9 將另外兩個控制臂連接到另一側。像之前那樣,先鬆開六角螺釘,然後將控制臂滑至軸上,最後再擰緊螺釘。
5.10 現在,將另外四個控制臂連接到另一個懸架模組上。

5.11 重複5.1-5.10的步驟三次,結束後您應有三對懸浮式馬達。
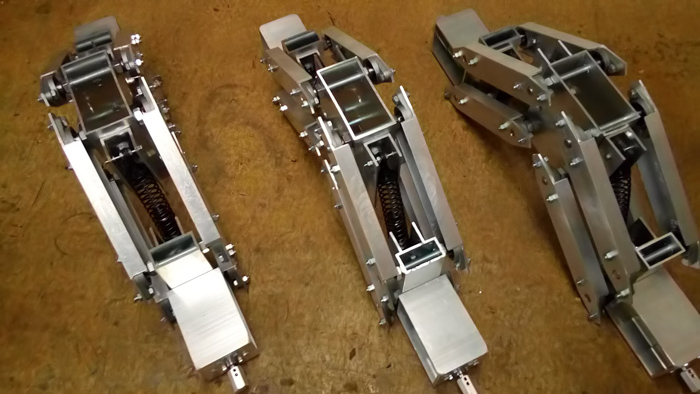
5.12 接下來,從10mm的螺旋杆上切下兩段,每段500mm長。將三個懸浮式馬達與10mm的螺杆連接,用一些M10螺母將框架模組固定到位,請注意不要用力過猛,還是像之前說的那樣,這會使型材發生彎曲變形。

5.13 現在,將12 mm~17 mm的六角合適器安裝到車輪上。

5.14 最後一步是使用一些M4x22螺栓將車輪與馬達連接。
