


仿生型六足機器人
Weaver
©CSIRO
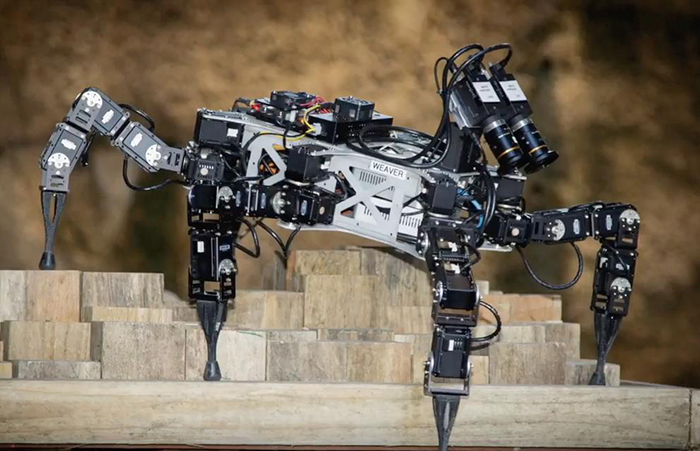
Weaver是一種終極版全地形六足機器人。由聯邦科學與工業研究所的機器人和自控系統小組研製 。
在澳大利亞的(CSIRO)機器人的每條腿上設有五個關節,實現了30°自由度。與更簡單的設計相比,這種驅動量可使六足機器人具有更高水平的本體感覺。本體感覺是指對身體各部位的相對位置和運動中使用的力度的感覺。外部感應能力使Weaver能夠即時實現本身的穩定,而無需之前版本中的地形配置功能。
如視訊中所示,Weaver能夠無縫地適應並走遍不同的地形。Weaver還能夠在高達50°的斜坡上保持靜態穩定。
Weaver還可以配備立體視覺,用於確定在所遇到的地形採取最合適的步態。以下視訊中為您展示了引導步態參數選擇的立體視覺展示。
這項技術和研究應用前景廣泛,包括環境研究、探索任務、搜索和救援等等。
製作自己的六足機器人!
六足機器人是最酷的機器人之一!您是否很想製作自己的六足機器人,但不知道從哪裡開始?請查閱我們的3D列印Arduino Hexapod教程:
 |
解決方案:Arduino Hexapod 第1部分 — 機械結構和接線 本教程將指導您如何創建自己的Arduino hexapod或Ardupod,使用3D印表機列印所有零件並僅使用12個伺服器來控制機器人。 |
 |
Arduino Hexapod第2部分:程式設計 在Arduino Hexapod系列的第二部分中探討了如何透過逆運動學來編寫第1部分中的Ardupod。 |
 |
Arduino Hexapod第3部分:遠程控制 您還可以使用HC-05藍牙無線控制ArduPod。您還可以使用Processing應用程式,這樣您就不必每次都使用書面命令來行動ArduPod。 |
Deviceplus 編輯團隊
Device Plus適合所有電子設計和機電一體化發燒友。