


仿生型六足機器人
MX-Phoenix
©Zenta
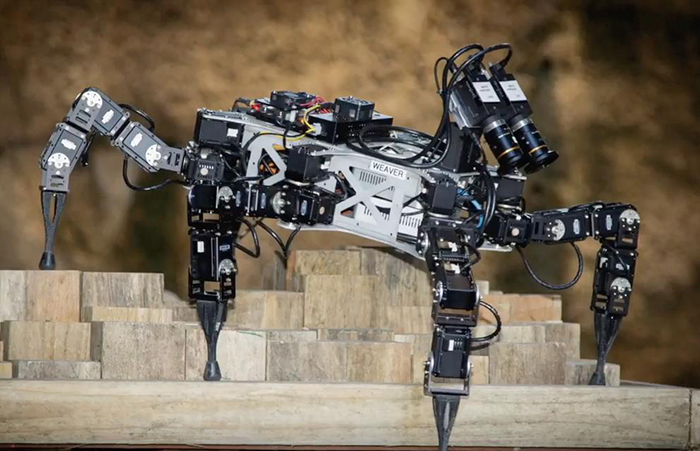
MX-Phoenix是由挪威工程師和機器人愛好者KåreHalvorsen共同設計的六足機器人,暱稱為Zenta。正如您將在下面的視訊中看到的,這台像狼蛛一樣強大的六足機器可以適合各種各樣的地形。MX-Phoenix可以在平坦的表面及不均勻的岩石地面行走,還可以上下樓梯。從展示影片中可看出MX-Phoenix的快速回應速度和非常穩健的步伐。
多年來,Zenta設計了許多六足機器人和其他種類的機器人,包括他屢獲殊榮的MorpHex機器人。他陳述了該特定專案的目標:
“更加動態的步態引擎和地形適應能力。我還想製作一台身體相對較小且腿部較大的六足機器人,我也試圖讓總重量盡可能降低。”
機器人的脛骨和身體元件使用Fusion 360設計並使用WANHAO Duplicator i3列印。他還使用丙酮蒸汽處理從而增加了列印的ABS零件的強度。Mx-Phoenix重量為4.76千克(10.5磅),總共使用了來自Robotis的18個Dynamixel伺服系統。C ++代碼中採用了Zenta六足機器人的自訂步態演算法(稱為DynaZgait),該演算法目前被用於Teensy 3.6 MCU。欲瞭解有關Zenta專案的更多資訊,請訪問zentasrobots.com。
Deviceplus 編輯團隊
Device Plus適合所有電子設計和機電一體化發燒友。