
Arduino探索漫遊車2—電子裝置與佈線

第九步:電源端接線
下一步是連接電源:電池和馬達。底盤上有六個馬達,但是我們僅有兩個VNH5019馬達驅動器。這樣一來,每個驅動器需要用於三個馬達。我們現在有兩種方式來連接這三個馬達:串聯或並聯。
- 串聯連接
馬達驅動器提供的電流直接流經三個馬達。但是,每個馬達上的電壓僅為驅動器輸出電壓的三分之一(假設所有馬達完全相同)。驅動器的輸出電壓為12V,那麼每個馬達上分配的電壓為4V,這是不夠的,因為每個馬達的額定電壓是12V。 - 並聯連接
驅動器的輸出電壓均等的外加到每個馬達上,所以每個馬達都有12V的電壓。在這種情況下,電流被分成了三部分,所以每個馬達僅能得到驅動器輸出電流的三分之一。馬達的額定堵轉電流為5A。驅動器可以提供持續電流12A以及峰值電流30A。這並不是十分理想,因為這種情況下驅動器無法提供足夠的電流使三個馬達都轉,但是對於這個專案來說,不會影響工作的正常進行。
因此,我們將進行並聯連接。需要記住一點,當對負載進行並聯連接時,總電阻值將會下降。在我們的項目中,因為我們連接的馬達大致相同,所以並聯之後的總電阻值恰好是一個馬達電阻值的三分之一。這可能會導致一些有最小負載要求的馬達驅動器出現問題。幸運的是,VNH5019沒有最小負載要求,所以我們可以順利地進行工作。
這裡是一個電源連接的示意圖。非常簡單,在+12V線上有一個切換,我們可以將其斷路來停止機器人的工作。電池連接到了驅動器和LoRenz研發板上,後者上有螺旋式接線端子,可以直接連接到Arduino VIN和GND引腳。
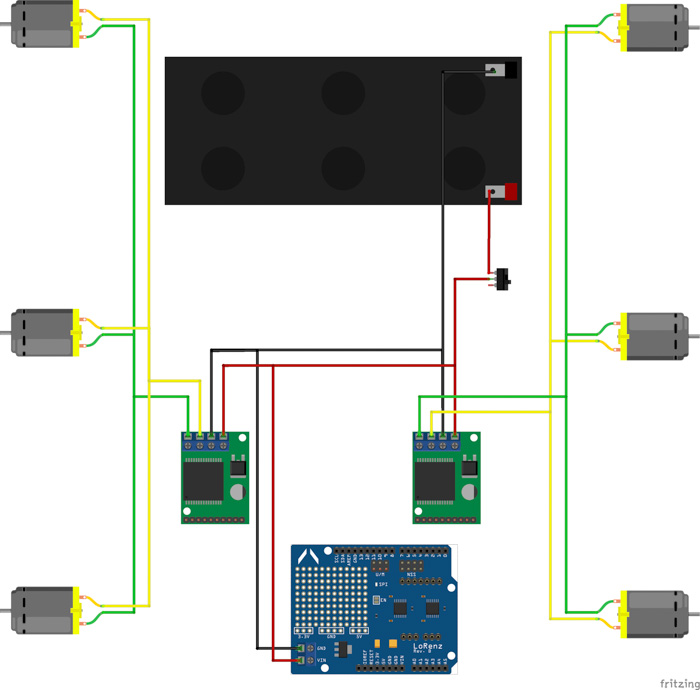
圖11:電源接線原理圖
我認為,這一步中最困難的部分是選擇將連接線放在底盤的什麼位置。您需要將它們放置在不會干擾其他運動零件的位置。另外,應該對這些連接線進行一定程度的遮蓋,因為當機器人在戶外探索時我們不希望這些線被其他東西絆住。
當您把所有的馬達連接好後,就可以將它們放回馬達模組中了。然後將連接線固定在底盤上,並與穩壓器連接。
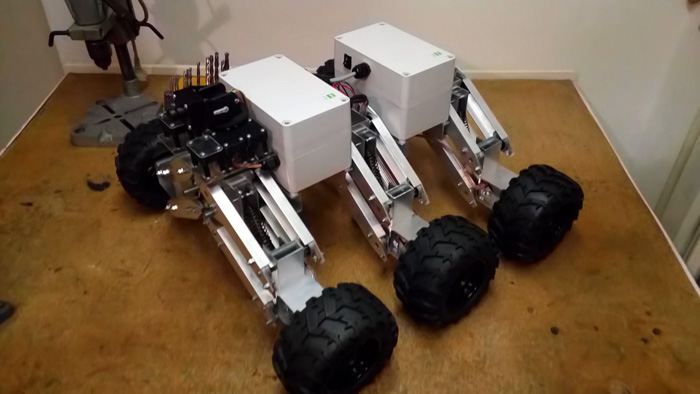
圖13:載有電子裝置的ArduRover底盤成品
結論
現在,該進行最後的接線測試了。使用萬用表仔細地對所有的連接進行測量,確保每一根線連接到正確的位置。這一步的重要性再怎麼強調都不為過,因為只要一根連接錯誤而造成電源與一個引腳之間短路的電纜,您的Arduino器件就會在煙霧中化為烏有,或者可能會造成使機器人工作的某些零件遭到毀壞。請記住,我們使用的是鉛酸電池,所有的電池都是為了—您知道的—啟動機器!這意味著如果發生了短路,將會輸出大量電流,關於這種情況的後果,您可以在YouTube上搜索一下“鉛酸電池短路”就知道了。
當把所有的電子裝置和電池安裝好後,機器人的最終重量也確定了。由於使用了巨型電池,現在機器人的重量達到驚人的 13 公斤 – 接近 29 磅! 實際上,我對懸架在這種負載下也可以正常工作而感到驚訝。但是既然這樣沒問題,那我們就終於可以把這台機器人帶到戶外去,看看我們辛苦工作之後的成果了。
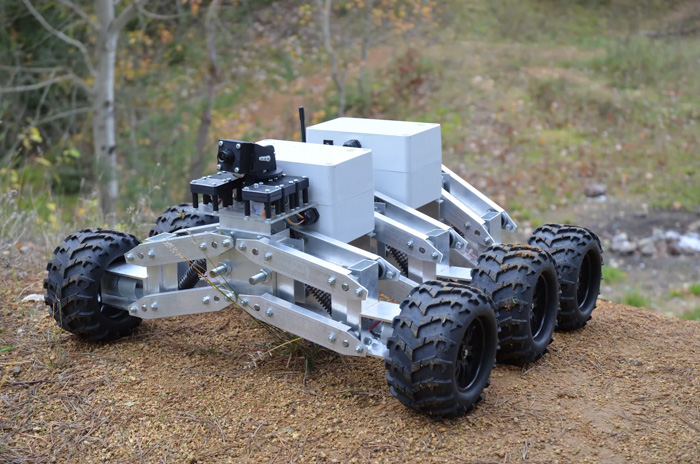

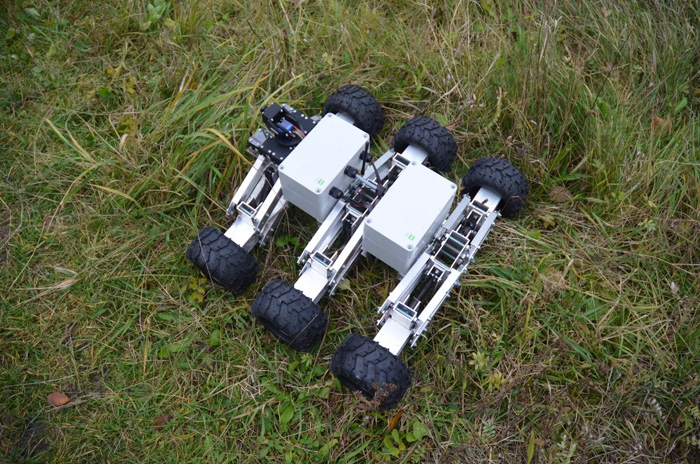


為了測試馬達在自然環境中的運行情況,我寫了一個簡單的應用程式,可以由我直接設定所有馬達的轉速和轉向!該應用程式在一台電腦上運行,透過一個序列埠向Arduino發送指令。然後Arduino透過LoRenz研發板將指令無線傳輸給機器人。坦率地說,用這種方式來控制機器人極具挑戰性。在上文中,您可以看到我嘗試控制漫遊車的視訊,大多數情況是失敗的。非常感謝我的朋友Jan Karásek幫助我拍攝照片和錄製視訊。
下一個目標是對機器人進行程式設計,以收集所有感測器相關的資料。目前為止,在機器人上運行的程式僅能控制馬達,我需要寫出更好的控製程式。因為透過鍵盤這種控制裝置來對機器人進行操控比較困難,尤其是在崎嶇地形上,我可能需要用一些其他的輸入裝置,可能是一種可用於電腦的外接遊戲機手柄風格的控制器,甚至可能是一個Android手機。有關這些內容以及更多的資訊將會在下一部分中進行介紹,請繼續關注!