
Arduino探索漫遊車2—電子裝置與佈線

第七步:底盤的最後調整
由於我們的機器人將在自然環境中進行行動,如果它安裝有一些感測器來測量周邊環境的所有特長,那就太酷了。為了達到這個目的,我將使用 ROHM 感測器評估套件,可以幫助我們更加容易的實現對環境中物理特性的感知。用於各個感測器的Arduino程式館可以點擊下面的連結下載。在本項目中,我將使用以下感測器:
- BM1422GMV – 磁力計
- RPR-0521RS – 環境光感測器
- KX022-1020 – 加速度計
- BM1383GLV – 壓力感測器
- ML8511A – 紫外線感測器
- BD1020HFV – 溫度感測器
但是有一個問題:所有感測器都被設計為在插入研發板上的介面後工作。因為在密封盒子內的研發板將會被封閉,這樣一些感測器,比如紫外線感測器,將無法測量出任何有意義的物理量。另外,諸如加速度計和磁力計這樣的感測器需要安裝在一個很穩定的平台上,如果僅僅將其插入研發板中,它們往往會發生大幅度的前後行動,這將會嚴重影響這些感測器的測量性能。
解決這些問題的方法很簡單。我們只需要一些用於這些感測器的外殼即可,某種可以輕鬆地安裝在底盤任何部位,並且可以提供足夠的覆蓋力卻又不阻礙感知我們想要測量的環境特長的東西。這就是為什麼我為所使用的感測器設計了這些小外殼的原因。它們可以透過任何3D列印裝置輕鬆的製造出來。關於這些小外殼的更多資訊,請參加另一篇文章:ROHM感測器評估套件的3D列印案例。

圖4:感測器外殼
另一個需要這種外殼的零件是相機。我們也想把相機固定起來,這也是用9g伺服器的原因。起初,我想使用一種可以在網上找到的便宜的相機支架。事實證明這浪費了5美元,因為這個支架在我第一次不小心撞到它時就折成了兩段。我沒有打算再買一個碰碰運氣,而是選擇自己來完成設計然後用3D列印製作出來!這次製作出的產品比第一個堅固得多,我們可以在它的輔助下拍到一些不錯的照片了。
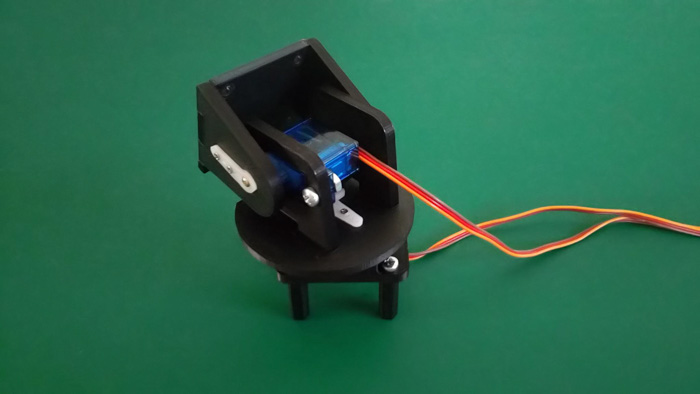
圖5:相機支架
該模型的相關檔案都可以在 Thingiverse上獲取,所以,如果您在任何專案中需要一個小尺寸、堅固的相機支架,就透過3D列印來製作一個吧!
當然,所有感測器和相機必須固定在某些地方。我決定將它們安裝在一個3mm方形壓克力板上,它位於框架前方的頂部。然後,我們將感測器的電纜連線到放置在它們正後方的電子裝置盒中。
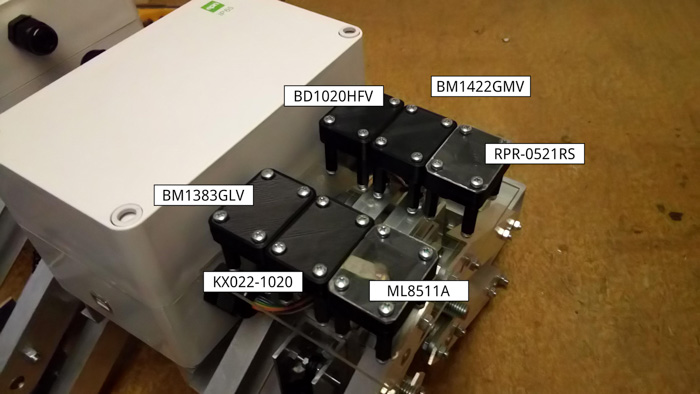
圖6:沒有相機時感測器的安裝細節這些標注分別顯示的是特定情況下使用的感測器
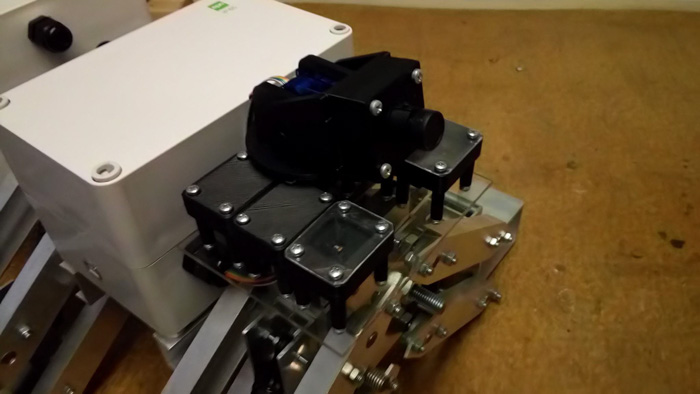
圖7:感測器和相機的最終安裝位置
您最後可能還要調整和更改抑制器的強度。因為我使用的是大型鉛酸電池,所以大部分重量會集中在最後的一對懸架上。為了彌補這一點,我將最後一對抑制器設定為最高強度,第一對設定為最小強度,中間的設定為中等強度。

圖8:設定為最高強度的抑制器(上)和設定為最低強度的抑制器(下)
該步驟取決於您所使用的電池型號。如果您的電池足夠輕,可能就沒必要更改抑制器強度。但是,我的電池比較龐大:具有8.5Ah的容量,重量達2.7 kg (5.95 lbs)。這是一個反復試驗並糾錯的過程,所以您需要做的就是把電池放到底盤上,然後修改設定,反復幾次後看看哪種設定的效果最好。理想情況下,底盤在一個平整的表面應該是水平狀態,不應有向前或向後的傾斜。