

Arduino探索漫遊車2—電子裝置與佈線

第八步:連接邏輯端
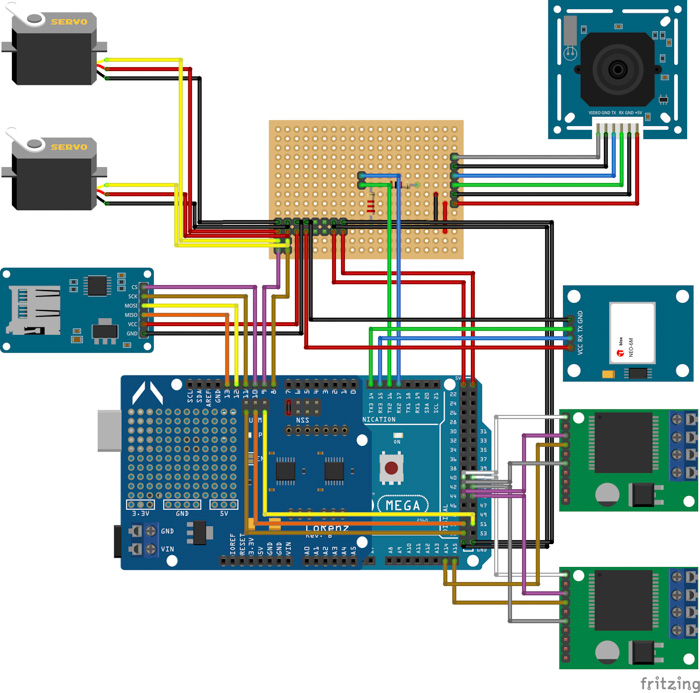
現在要介紹的是本文中最具挑戰性的部分:將邏輯端、感測器和Arduino連接在一起。即使我們使用兩個研發板(LoRenz研發板和ROHM感測器評估套件擴展板),還是有許多模組需要連接。這裡顯示的是接線的Fritzing示意圖。請注意,ROHM擴展板沒有顯示在示意圖中,因為它會覆蓋其他大部分的連線。
圖9:邏輯端連線的Fritzing示意圖
有點混亂是嗎?除了馬達驅動器直接由電池供電,其他所有組件都是由Arduino的5V穩壓器來供電的。Arduino本身也是由該穩壓器供電。現在,我們來分別看一下那些重要的元件連接。我的建議是一次連接一個模組,然後每次建立一個新的連接都進行測試。
-
- 伺服器。伺服器的訊號與Arduino的引腳8和9連接,支援PWM(脈衝寬度調製)。
- LoRenz 研發板。該研發板使用SPI匯流排。不好的一點是,在Arduino Mega上匯流排用的是50、51和52引腳,而這個研發板設計的是使用Arduino UNO,所以SPI匯流排應該用13、12和11引腳。我們可以透過直接連接研發板上U/M連接器的引腳和Arduino Mega上的對應引腳來解決這個問題。同時,從機選擇引腳將會保留在默認位置(引腳7)。
- SD 卡模組。和LoRenz研發板一樣,該模組使用SPI匯流排。所以我們應該直接將它連接到引腳50、51和52以及一些作為從機選擇的通用數位引腳就可以了,是這樣嗎?好吧,其實沒有那麼簡單。我們的Arduino具有5V邏輯電平—這意味著電壓電平5V(有一定的容差)會被釋義為邏輯1,而電壓0V(有較大容差)被視為邏輯0。LoRenz使用的無線模組具有3.3V邏輯電平,但是已被適當的轉為5V,來實現與Arduino之間的可靠通信。SD卡模組也具有3.3V邏輯電平,但是,它只能在一個方向進行轉換(因為這樣製造成本較低)。這意味著從模組發出的所有訊號仍然是3.3V邏輯電平。這使匯流排上的通信變得非常不可靠,或者有可能會直接破壞通信。這些話的含義是,如果您要處理的匯流排上的邏輯電平不同,而該匯流排上可能有兩個以上的裝置,則正確的做法始終是對它們進行轉換,確保避免在一個匯流排上混合使用不同的電壓電平。
幸運的是,SPI通信非常簡單,可以透過軟體來進行。所以我們只需要把SD模組連接到任何3個數位引腳,然後透過代碼進行處理即可。我選擇的引腳是13、12和11。 - VC0706 相機。相機使用RS-232(序列)匯流排進行連接。再強調一下,相機具有3.3V的邏輯電平。因為一次只能將兩個裝置連接到RS-232,所以只需要在Arduino RX線上使用一個簡單的分壓器就夠了。相機使用的是Mega引腳16和17上的第三個硬體序列線(Arduino代碼中的Serial2)。
- GPS 模組。這是第二個使用序列線的模組,因此我們可以將其放置在第四個序列埠(Serial3)的引腳14和15上。我故意略去了第二個埠(Serial1),因為引腳18和19都可用於觸發中斷,我們之後會需要將其用到感測器上。
- ROHM 感測器擴展板。該擴展板位於LoRenz研發板上方。這裡,我們需要把感測器和中斷引腳連接起來。我按照以下方式對感測器進行連接:
感測器名稱 擴展板插槽 BM1422GMV I2C_1 KX022-1020 I2C_2 RPR-0521RS I2C_4 BM1383GLV I2C_5 BD1020HFV ANALOG_1 ML8511A ANALOG_2 因為LoRenz已經使用了中斷引腳2和3,我們不能簡單地透過將擴展板上的一些引腳短路來選擇它們(有關ROHM感測器擴展板上中斷工作方式的更多資訊,請參閱RohmMultiSensor wiki)。BM1422GMV位於插槽I2C_1,該插槽連接到INT1。因此,我們將會把INT1連接到Arduino可以觸發中斷的引腳18。類似地,KX022-1020位於連接到INT3的插槽I2C_2,我們會將其連接到Arduino的引腳19上。
- VNH5019 馬達驅動器。這些驅動器不需要用專門的匯流排進行連接,只需要兩個數位引腳控制方向、一個PWM引腳控制速度、一個類比引腳(可選)來讀取流經馬達的電流即可。左側驅動器連接到引腳41、43和45(PWM)以及A15(類比),右側驅動器連接到引腳40、42和44(PWM)以及A14(類比)。
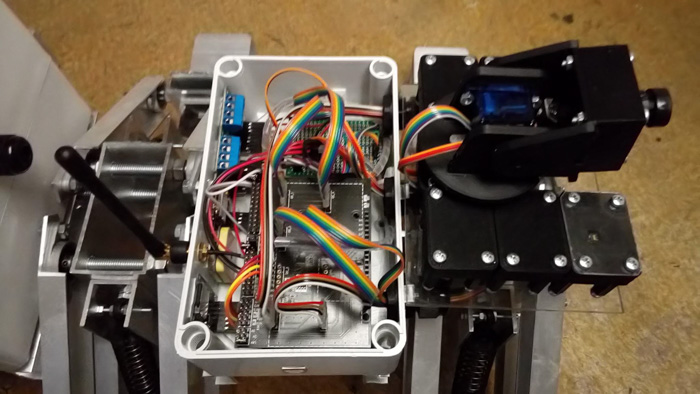
到目前為止您已經都完成了嗎?太棒了,因為這是本文中最難的一部分!當您完成佈線後,應該看到類似以下的內容:
圖10:所有已完成連接的電子裝置
Jan Gromes
Jan目前就讀於布爾諾理工大學電氣工程專業,擁有多年Arduino和其他微控制器專案經驗,尤其對於機器人系統的機械設計感興趣。