


Arduino探索漫遊車2—電子裝置與佈線



歡迎回到ArduRover系列的第二部分!在Arduino 探索漫遊車1—底盤中我們構建了一個可以在崎嶇地形行駛的六輪驅動大型越野機器人。在本文中,我們將把重點放在電子裝置上——我們需要大量的感測器,巨型電池以及一些無線控制的工具。好,讓我們開始吧!
硬體
- 第一部分製作的ArduRover底盤
- 12 V 鉛酸電池(容量越大越好,我使用的是8.5Ah)
- Arduino Mega
- 帶SPI介面的SD卡模組
- 帶序列介面的GPS模組
- 帶序列介面的VC0706 JPEG相機
- 2x 9 g 微型伺服器
- 2x Pololu VNH5019 馬達驅動器(驅動模組,非研發板)
- ROHM 感測器評估套件
- LoRenz 研發板+ SX1278模組
- 將所有裝置連接在一起的電纜和跨接線
工具
- 3D 印表機(推薦)
3D 列印零件
- 相機支架–可在 Thingiverse上獲取
- 感測器盒–可在 Thingiverse上獲取
在進行佈線之前,我們需要一個地方安置所有的電子裝置—最好是一些防水的盒子。為了把這些盒子安裝到底盤上,我們需要一些輔助零件。那麼,就讓我們回到車程式館去來製作這些東西吧。完成後,我們還需要對底盤做一些最後的調整。
第六步:安裝電子裝置的支架
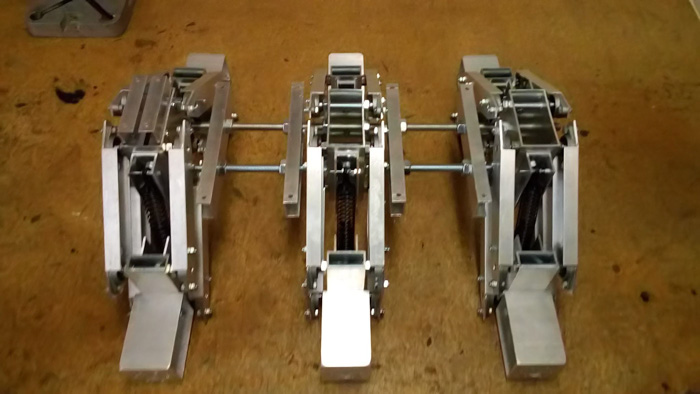
在上一篇文章中,我詳細介紹了用鋁型材製作零件的過程,所以在本文中,我就將這一部分做一下簡短介紹。畢竟,這些支架本身也都比較簡單:它們由與控制臂相同的U型材製成,並且有兩個10mm的孔,可將其滑動到兩個10mm的中央螺紋杆上。下圖是支架的照片:
圖1:放置電子裝置盒的支架
這是將支架安裝到底盤後的樣子,兩側均用一個M10螺母將其進行固定,為電子裝置和電池提供了一個穩定而堅固的平台。
圖2:安裝在框架上的支架
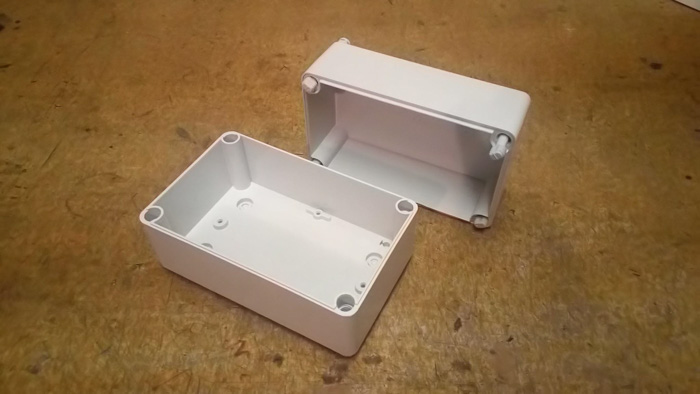
您可能已經注意到了,我沒有提供支架的設計圖紙。那是因為您可能會使用不同的盒子來放置電子裝置。比如,我使用的盒子尺寸是105 x 170 x 112 mm,所以我的支架長170mm,兩端有兩個4mm的孔。您需要在這裡進行一些自訂的設計,並且對方案進行調整來滿足自己的需求。儘管如此,我還是建議您使用具有較高IP編碼的盒子。IP編碼代表的是防塵等級(第一個數位)和防水等級(第二個數位)。例如,我的盒子防護等級是IP65,這就意味著6級固態顆粒防護(防塵外殼)以及5級液體侵入防護(外殼可防噴水)。除了機器人要浸沒入大量水體中(或者駛入洗車間)的情況,我想這個等級就足夠了。
圖3:我用來裝電子裝置的IP65盒
Jan Gromes
Jan目前就讀於布爾諾理工大學電氣工程專業,擁有多年Arduino和其他微控制器專案經驗,尤其對於機器人系統的機械設計感興趣。