
四款應用先端技術的酷炫遊戲


©ECAL
1. Deltu, 焦躁易怒的“鏡像介面”機器人
Vimeo網站上展示了來自ECAL大學的Deltu ECAL/Alexia Léchot。
擁有人工智慧的機器人並不新鮮。然而,與我們所熟悉的可愛人型機器人不同,這位名叫Deltu的Delta機器人有三條腿,但是卻沒有臉。Deltu的外表並不那麼惹人喜愛,而且當對手水準太低時,Deltu甚至會鬧情緒。
法國洛桑藝術設計大學(ECAL)的互動設計系學生Alexia Léchot構建了這台Deltu,作為其學士學位畢業專題的一部分。該機器人是一種3D機器,通常用於製造工廠,負責包裝、移動產品等。添加了AI人工智慧之後,Deltu和人類可以通過Lechot創建的應用程式進行遊戲。Deltu可以通過二台相對的iPad,實現三種類似鏡像模仿的遊戲。第一種遊戲就是人們在iPad上隨手畫一些東西,Deltu則嘗試對圖像進行解析,並將其畫在己方的iPad上。第二種遊戲是二名參賽者之間進行競賽。第三種遊戲是一種記憶遊戲,人們試著畫出機器人所提出的圖案。如果對手表現不佳,機器人就不跟你玩了。然後它會上網、拍幾張自拍照,並將其發佈在社群媒體上,比如Instagram。
Alexia在接受Arduino的採訪時說到,電機領域中的探索和學習帶給她在設計這款機器人時許多的靈感。機器人並不一定要具有人形,因為沒有人規定必須如此,對不對?機器人在社會中的地位還沒有定論,因此Alexia還有很多空間來擴展她的想像力。
原型機
Deltu主要是由木頭和銅柱所製成,系統還包含Arduino Uno、三個帶有金屬齒輪的馬達、Arduino Proto Shield和USB 2.0傳輸線。其軟體通過兩個Unity應用程式來運行。iPad向電腦發送HTTP請求,然後Python伺服器通過端子再將字串發送至Arduino Uno。
2. Forpheus, 乒乓球機器人

©AutoPartsAsia
歐姆龍是一家在自動化領域中擁有高度感測器技術和控制技術的公司。據說其技術可“激發出人類潛能”。歐姆龍研製的名為Forpheus的機器人,還被金氏世界紀錄認定為“首台機器人乒乓球教練”。該機器人的控制極其精確,其解析經度快至1/1000秒。
歐姆龍公司表示,Forpheus是一款經驗型機器人,向大家展現了人機關係演變的願景。該公司致力於先端技術開發,期望能創造出更豐足的社會,及人機之間最“和諧”的未來。在這種情況下,機器將帶給我們更多更豐富的經驗,並協助人們做出更多極富創意巧思的決策。
原型機
開發人員克服諸多挫折,致力於提升感測器的精度,使得回擊的球能夠讓對手輕鬆打到。系統採用二台相機跟蹤球的位置和速度。然後,根據球的軌跡和減速度來估計轉速。機器人會進行瞬時分析,甚至會考慮到馬格努斯效應(Magnus Effect)。機器人還能夠識別對手的站立位置和球拍位置,分析球的3D位置並預測其軌跡。該機器人配備了歐姆龍專有的預測模型,擁有精確的旋轉速度和即時回應,能夠準確計算球的軌跡(因為它每秒可進行80個不同的計算)。
該機器人還透過提高人類玩家的成就感來幫助運動員。它能夠記住球的軌跡,並考慮到人和機器人本身最容易的擊球位置。根據人類對手在遊戲中的水準,機器人還可以加快速度或者降低擊球力道。
歐姆龍認為,Forpheus使用的這種技術可以為工作場所的人類活動提供支援。通過檢測和預測貨物的位置和運動,以及自身運動的控制和即時資訊傳遞,這種系統能夠改善工廠生產過程的工作環境。
3. Mouser Electronics ——美國隊長之盾和鋼鐵俠手套
Mouser Electronics公司發佈了Empowering Innovation Together(共同創新)系列的一個新專案,由前演員和工程師Grant Imahara主持。他們打造了一個創新實驗室,旨在使用不同技術來製作新產品。這次他們證明了有些科幻特效可以成為現實技術。夢想成真了嗎?Imahara決定打造出現實版的鋼鐵人手套,而他的對手Allen Pan則是成功再造了美國隊長的盾牌。
Mouser公司的高級市場副總裁Kevin Hess表示:“我們與Marvel在他們的新專案系列上展開合作,這是讓今後的工程師可實際參與,並對科學、技術、工程和數學(或STEM)教育感興趣的有效方法。”他認為有必要持續塑造下一代具創新想法的人。
原型機
鋼鐵人手套:
首先,Imahara使用3D印表機製作出鋼鐵人手套的零件,然後裝上以合法途徑購買的高功率雷射器。為了能夠自由伸縮彈出,Imahara設計了一個使用微型馬達的特製機構。他使用的是ADI公司的ADP5054 DC/DC小尺寸電源轉換器。為了連接所有模組,他還使用了Molex的UltraFit電源連接器,因為它體積雖然很小,但是電流承載能力卻很強。
美國隊長盾牌:
Pan將盾牌極具創意地構建在一台無人機的頂部,以便盾牌可飛離並確實返回。盾牌還需要一個具有加速度計的特殊手套,以便讓發射器將手臂動作投射到附有盾牌的無人機。這樣,Pan就可以在沒有遙控器的情況下射出盾牌。
Pan的最大挑戰就是如何讓盾牌飛起來。由於盾牌必須放置在無人機頂部,因此其重量將不能超過100克。還好最終的結果是大約96克,精密到即使油漆重量也必須計算出來。Pan還使用了Molex的Temp-Flex電線和一個ADI 的加速度計。
兩者的比賽如下:用各自的武器將一個氣球擊飛三次。最終Imahara和Pan認為他們打成了平手。雖然這與真正的英雄電影不完全相同,但這是一個非常成功的計畫,為朝向終極目標打下了良好基礎。
4. 637毫秒內復原魔術方塊的機器人
©Infineon
自1974年匈牙利人Erno Rubik發明魔術方塊以來,就一直獲得了人們的高度關注。14歲的Lucas Etter在4.9秒鐘內就可進行復原,震撼了全世界。然後,一名荷蘭人Mat Valks創下了4.74秒的新紀錄,並被列入金氏世界紀錄。人類一直在挑戰如何在最短的時間內復原魔術方塊,然而,有些人已經展開了利用機器人來復原魔術方塊的挑戰。僅在Valks創下吉尼斯記錄幾天之後,德國科學家Albert Beer就打造出機器人Sub1,它只需0.8876秒即可復原。
Sub1包含二台拍攝魔術方塊六面型態的網路攝影機、一個相容Arduino的微控制器以及六個旋轉魔術方塊的步進馬達。按下啟動按鈕後,二台網路攝影機的快門會拍攝二張照片,每張圖片顯示魔方的三個面。然後機器人會識別出魔術方塊的顏色,並利用Herbert Kociemba兩相演算法形成一個解決方案。系統能在步進馬達轉動20次之內復原魔術方塊。
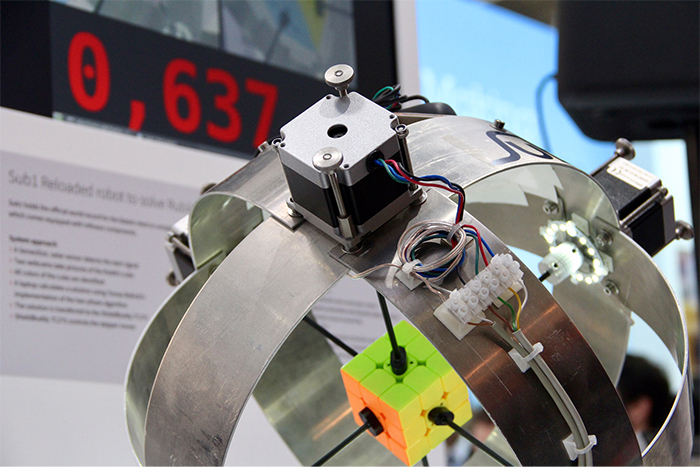
現在,Beer又創造了另一款機器人Sub1 Reloaded,在最的近Electronica電子展上再次打破記錄。該機器人這一次只用了0.637秒。
原型機
構建能夠解決複雜魔術方塊的機器人並不容易。這需要強大的計算能力。Sub1 Reloaded搭載了AURIX™系列的ShieldBuddy TC275微控制器。Sub1 Reloaded還包括用於運動檢測的Sense2GoL雷達套件(BGT24LTR11)、IRLB8721PBF MOSFET以及六台Trinamic QSH5718步進馬達。
Sub1 Reloaded能夠透過各種微晶片模仿人體動作以及其他功能。該機器先對魔術方塊拍照,從而找出最快最好的解決方案,並將指令發送到其他動作部位。魔術方塊各面的六台馬達在不到一秒的時間內即可解決這個問題。
雖然每個魔術方塊都可以透過20次動作進行復原,但是為了創下更佳的紀錄,Albert Beer還是為Sub1 Reloaded多增加了幾次動作。