
擁有真人般觸覺的軟質義肢


©Cornell
具有類似人類觸覺的軟質機械手臂開啟了義肢研究的新領域。手是人類身體接觸所有外界事物的重要部分,不僅具有觸摸、拿取和抓握的功能,而且指尖還擁有非常敏感且與身體其他部分相連接的感覺神經。
康奈爾大學的一個由機械和航空航太工程助理教授、有機機器人實驗室(ORL)首席研究員Robert Shepherd所帶領的研究團隊研製了一種搭載光激性應變感測器的義肢手,能夠實現類似人類手臂的功能。該義肢手可以讓每根手指分別產生動作、觸摸物品並擁有內部感觸。
通常,我們認為機器人都是由金屬製成的剛性結構,其感測器通常位於機身外部。然而這支特殊的義肢手是軟質的,而且具有觸覺。Zhao表示,“我們將感測器集約在義肢手的內部,因此,這些感測器實際上可以通過機器人的厚度來檢測所傳遞的力量,就像我們和所有生物體感受疼痛的道理一樣”。
目標和設計
該專案計畫旨在證明光學感測器可以安裝到軟質致動器中,並提供高品質的感測能力。這些彈性光波導管的高度可延伸、在化學特性上較為穩定、易於製造並擁有高精度的訊號輸出。
該義肢手安裝在一個3D列印的剛性手掌上,由四根致動軟指(ΔP= 100kPa)和一根拇指組成。研發團隊選用3D列印和軟微影術的原因如下:這些技術擁有較高的設計自由度、重塑軟質材料形狀的能力以及高精度。
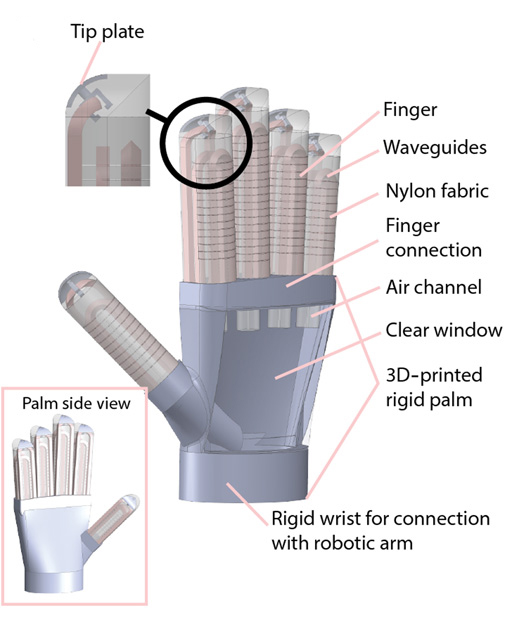
圖1.柔軟義肢手結構和元件 / ©Zhao等人,2016
指尖由外徑18mm的中空矽膠管製成。四根手指通過氣動系統控制。壓縮空氣通過中空管進入之後,充氣壓力驅動手指執行各種手的動作。義肢手的每根手指都設計為軟性,以利用其內在的順應性,因此他們可以通過開環控制執行大部分的實驗。軟質致動器可以將外力傳至內部結構和嵌入式感測器。指尖還集成了與波導相連、直接將外部力傳遞到波導的指尖感光板,以提高觸覺靈敏度。
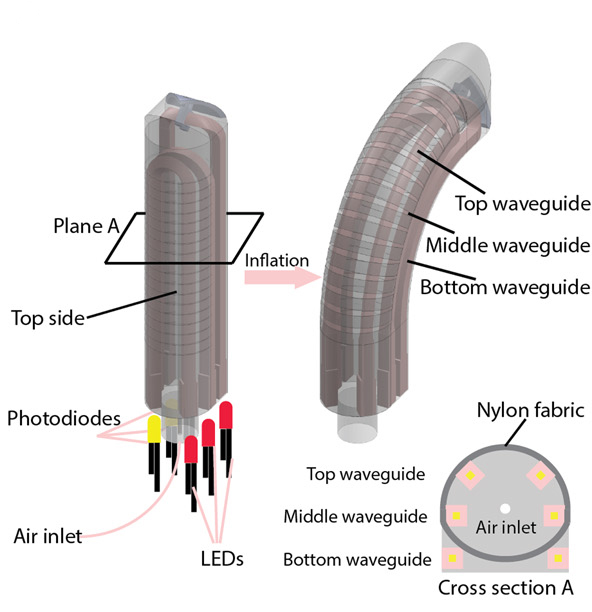
圖2. 軟質手指結構和元件 / ©Zhao等人,2016
每根手指都由具有細縫的尼龍織物所製成,以實現圓周型伸展並進行致動。致動器中嵌入了光學應變感測器,而且每根手指中嵌入三個波導(U形波導;頂部、中部和底部)。嵌在手指中的感測器通過光學元件傳遞壓力、紋理和位置等相關資訊。
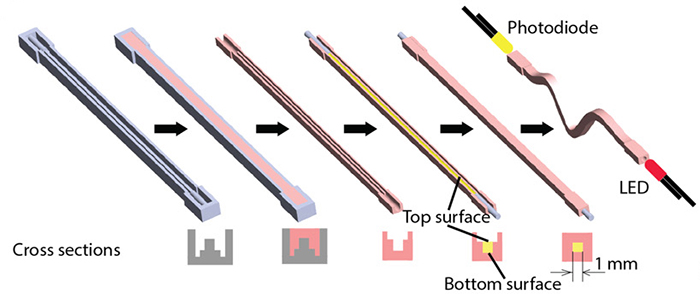
圖3.波導建構過程 / ©Zhao等人,2016
引導電磁波的彈性波導為中空管,使用透明聚氨酯橡膠製成。光通過波導管傳播時會產生損耗,如果波導管發生變形,光損失量還會增加。管中的光損失量通過一個光電檢測器測量。機械手利用這些光信號收集觸摸物體的資料,因為波導在觸摸過程中會發生彎曲、變形或改變光信號。具延展性的波導以軟性微影製程進行製造,每個波導含有一個LED和光電二極體。
下方影片展示了三個波導的功能(在一個手指中):
- 指尖被夾住時,只有底部波導會產生反應;
- 手指充氣和拉直時,中間和頂部波導會有反應
- 手指放氣時,中間波導產生反應。
實驗
根據人類手指的常用功能,研發團隊進行了三項測試:形狀和紋理檢測、柔軟度檢測以及物體識別。
1. 形狀和紋理檢測
用人類手指去感覺一個表面的粗糙度和形狀,最常用的探察方法就是橫向掃描。研發團隊利用自己的機器人手臂引導機械手在固定高度對多個表面進行橫向掃描,以區分其形狀和紋理。他們透過該方法測試了手指如何反映七種不同3D列印表面的能力。實驗結果顯,該機械手能夠區分5m-1的彎曲度以及100μm級別的粗糙度。
2. 柔軟度檢測
在本次柔軟度測試中,機械手測量了以下五種材質和物體的柔軟度:丙烯酸塑膠、聚氨酯海綿、矽橡膠、成熟番茄、未成熟番茄。致動器的尖端必須直接接觸物體頂部,以讀取指尖的受力大小和彎曲程度以及不斷變化的內部壓力,這二部分資料分別由底部波導功率損耗和頂部波導功率損耗表示。
根據內部壓力改變手指的剛性硬度也有助於為每種材料生成應力-應變曲線。“底部波導中的損耗與物體的接觸力(應力)成正比,而頂部波導中的損耗與其變形(應變)成正比。”研發團隊測量了每個物體的四個狀態,並且能夠將其融合成線性曲線,從而進行比較。
3.物體識別
物體識別的實驗方法如下:研發團隊要求機械手從三個番茄中挑出最成熟的一個。在這個展示過程中,研究人員結合了形狀和柔軟度測量。首先,他們用橫向掃描、形狀重建的方法來確定番茄的形狀和位置。然後,機械手用食指確定番茄的輸出訊號,從而測量其柔軟度。最成熟的番茄的頂部波導損耗最大且底部波導損耗最小。就像我們在超級市場一樣,該機械手輕輕按壓每個番茄,最後找到了其中最軟的一個。
討論
這種具有豐富感覺的柔軟義肢手是將材料科學和機器人技術中的幾個領域加以融合和延伸的成果:3D列印、軟微影術和軟質機器人。這些創新技術使得機械手實現了極高的精確度和極佳的延展性。該團隊還強調了義肢手極容易進行製造和化學上的相容性。此外,機器人領域將受益於可延伸波導感測器的高度再現性。
該原型還有很多方面需要改進。研究人員表示,透過在致動器中匯集更多的感測器或更換致動器本身,可以提高本體感受和外部感受性的感覺密度。如果使用較大功率的LED、大功率雷射二極體以及增加軟質致動器的壓力範圍(即更大壓力),機械手的觸覺靈敏度還可以再增加。