
用Arduino Uno製作一個智慧自動寵物餵食器(續)
第4步:添加RFID
RFID是該系統的核心。當你的寵物靠近餵食器時,RFID將讀取標籤上的值,並決定是否提供更多的食物。RFID系統採用SPI通信,將標籤的值存儲在EEPROM記憶體中。在這種情況下,如果發生系統故障(例如斷電等引發的問題),資訊將被保存到記憶體中。
有關Arduino SPI通信的更多資訊,請參閱Arduino 通信協議課程。
就RFID而言,必須添加以下程式館:
- SPI
- MFRC522
- EEPROM
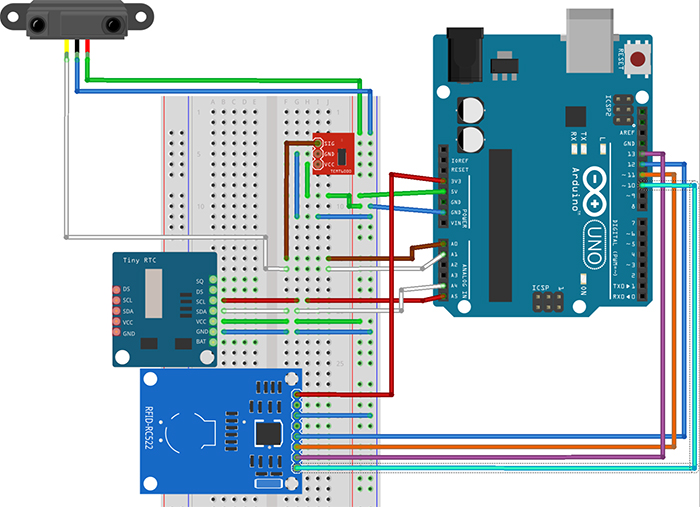
圖13:添加了RDIF的接線圖
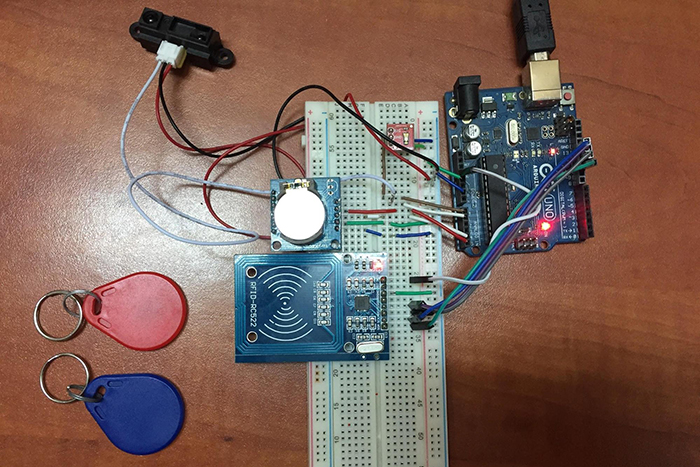
圖14:RFID與其他元件連接的示意圖
我們有兩個RFID標籤。紅的會裝在寵物身上。作為測試組,藍的會裝在外人身上(不是你寵物的其他東西)。該系統有兩個功能:
- 白天:上午8時至晚上8時,餵食器每4小時投放3次食物。當食物被投放出來以後,蜂鳴器會發出聲音作為訊號,它會叫你的寵物過來進食。當有聲音時,寵物就會知道該吃飯了,它會靠近自己的碗(食物容器)。當標籤靠近RFID閱讀器時,食物就會被投放出來
- 晚上:不會發出聲音,但如果寵物在早上0點以後接近RFID,則將被餵食一次。
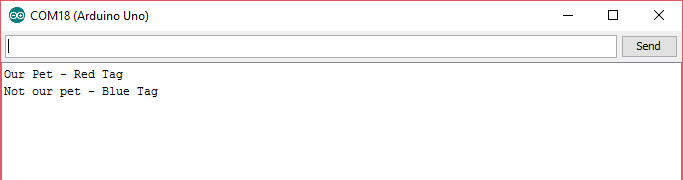
圖15:在串口監視器上所顯示的分配標籤
第5步:安裝馬達
我們將使用伺服馬達SG90。伺服角度的大小是(0-180度)。我們的鎖具系統將類似於一個角度控制的鎖具(當“鎖具”打開/解鎖時,可控制投餵多少食物)。
以下是一些要點:
- 0 度:“鎖具”完全斷路,沒有食物投放;
- 180 度:“鎖具”完全打開,食物全部投放;
- 在0-180之間:你可以選擇投放多少食物。
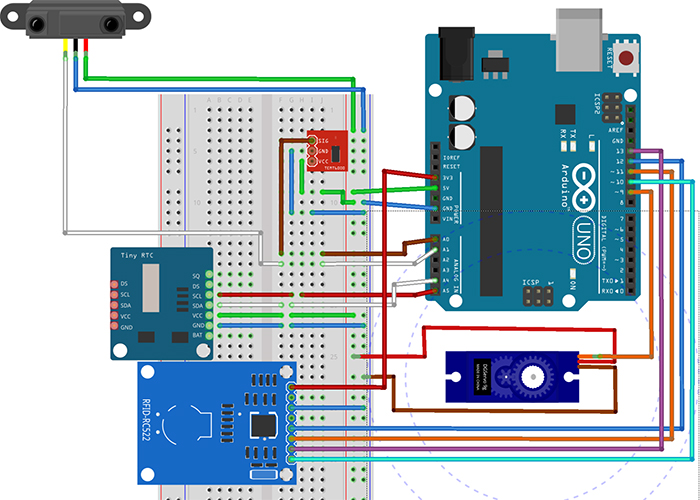
圖16:完整的項目接線圖
第6步:製作機械部分
在我們討論馬達的程式設計之前,我們需要製作餵食器的支架。現在就需要研究一下餵食器的機械部分。我們需要以下材料:
- 金屬板(或木板)- 35×25 釐米
- 瓶子(或塑膠容器)
- 打開/斷路食物分配器所需要用到的2塊硬質材料
- 把瓶子固定在金屬板上
用鑽在金屬板上鑽4個洞,為碗留出空間(這個距離取決於你的碗/食物容器有多高。之後,你需要把瓶子倒過來,用兩根線固定到金屬板上。

圖17:用兩根線把瓶子(食物分配器)連到金屬板上
“鎖具”系統不能懸在半空中,所以我們要用一塊堅硬的材料來固定它。這為食物分配器提供了一個很好的開口。我們需要用鑽頭或膠帶將其固定在金屬板上,這樣它就不會塌下來,以防你把太多食物放在分配器裡。如下圖所示,為了防止鎖具的錯位,需要彎曲金屬部分的外緣。
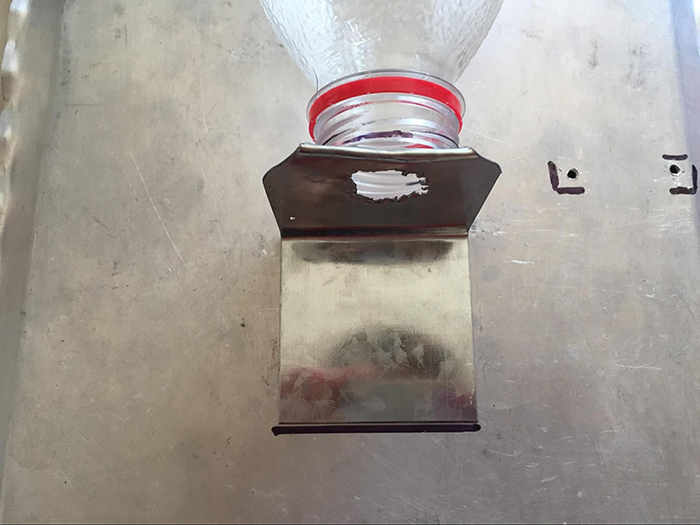
圖18:支架安放位置
- 放置伺服馬達
我們需要把馬達接到金屬板上。我在金屬板上鑽了個洞,以便牢牢地固定伺服馬達。接下來,我們需要將伺服馬達連接到機械系統上,透過滑動鎖蓋來打開和斷路鎖具。這是透過線纜將蓋板的中間(靠近外緣)連接到馬達上的(圖17)。只要確保蓋板順利地打開和斷路,你可以用任何材料來製作這個裝置。
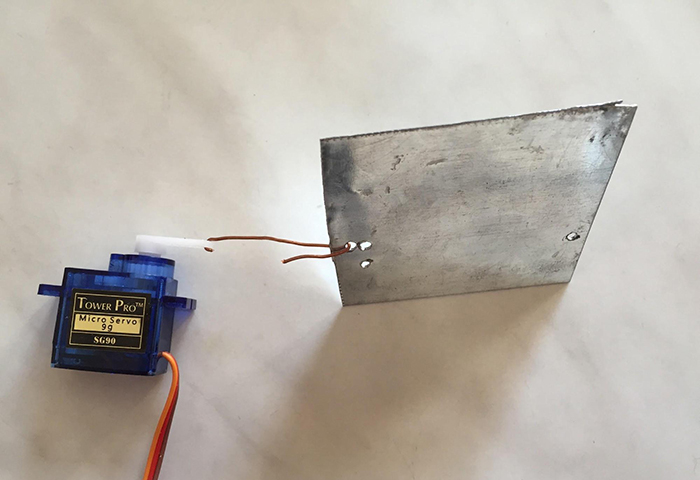
圖19:在合適的地方鑽一個用來連接馬達的孔
到這裡,你差不多就要完工了。接下來,你只需要把餵食器固定到你想要的地方。請確保這個地方足夠安全,你的寵物無法輕易地拆除餵食器即可。
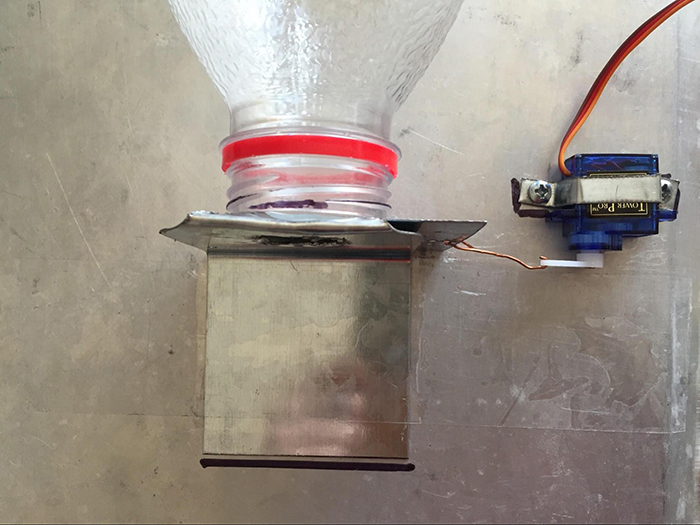
圖20:在支架附近接好馬達
為了保證精度,請不要弄彎連接食物分配器蓋板和馬達的線纜,否則馬達的馬力會因此削弱。
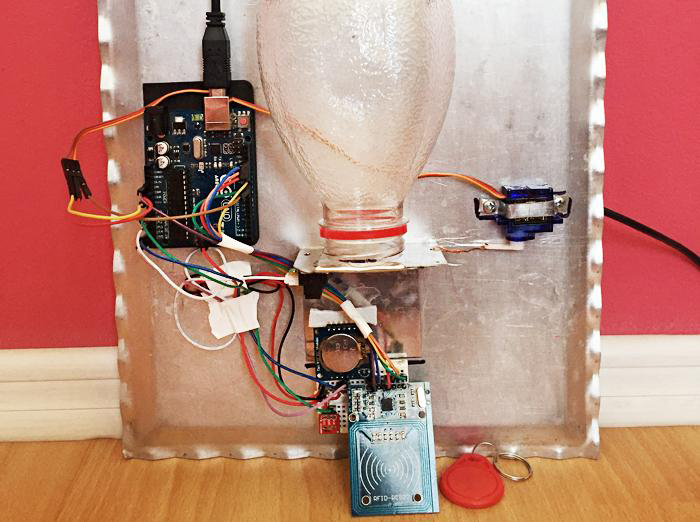
圖21:完工後的寵物自動餵食器
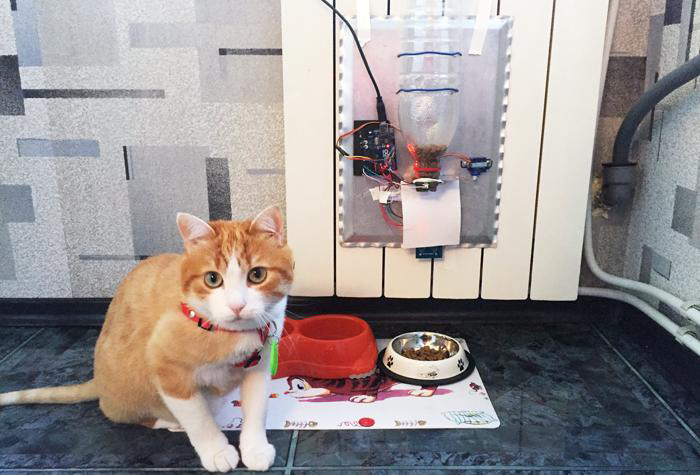
圖22:最終成品
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254 255 256 257 258 259 |
#include <Wire.h> #include <Time.h> #include <TimeLib.h> #include <DS1307RTC.h> #include <Servo.h> #include <EEPROM.h> #include <SPI.h> #include <MFRC522.h> #define SS_PIN 10 #define RST_PIN 9 Servo myservo; boolean match = false; boolean programMode = false; boolean replaceMaster = false; int lightSensor = 0; int distanceSensor=1; int pos = 0; int successRead; byte storedCard[4]; byte readCard[4]; byte masterCard[4]; MFRC522 mfrc522(SS_PIN, RST_PIN); void setup() { Serial.begin(9600); setSyncProvider(RTC.get); myservo.attach(9); Serial.begin(9600); SPI.begin(); mfrc522.PCD_Init(); if (EEPROM.read(1) != 143) { do { successRead = getID(); } while (!successRead); for ( int j = 0; j < 4; j++ ) { EEPROM.write( 2 + j, readCard[j] ); } EEPROM.write(1, 143); } for ( int i = 0; i < 4; i++ ) { masterCard[i] = EEPROM.read(2 + i); Serial.print(masterCard[i], HEX); } } void loop() { int valueFromLightSensor = analogRead(lightSensor); int valueFromDistanceSensor = analogRead(distanceSensor); int distance= 4800/(valueFromDistanceSensor - 20); Serial.println(distance); do { successRead = getID(); } while (!successRead); if (programMode) { if ( isMaster(readCard) ) { programMode = false; return; } else { if ( findID(readCard) ) { } } } else { if ( isMaster(readCard)) { programMode = true; int count = EEPROM.read(0); } else { if ( findID(readCard) ) { if ((hour()>=8) && (hour()<=12 )){ if (distance>=20){ for(pos = 130; pos>=1; pos-=1) { myservo.write(pos); delay (20); } for(pos = 50; pos < 180; pos += 1) { myservo.write(pos); delay(20); } } delay(10000); } if ((hour()>=12) && (hour()<=16 )){ if (distance>=20){ for(pos = 130; pos>=1; pos-=1) { myservo.write(pos); delay (20); } for(pos = 50; pos < 180; pos += 1) { myservo.write(pos); delay(20); } } delay(10000); } if ((hour()>=0) && (hour()<=8 )){ if (distance>=20){ for(pos = 130; pos>=1; pos-=1) { myservo.write(pos); delay (20); } for(pos = 50; pos < 180; pos += 1) { myservo.write(pos); delay(20); } } delay(20000); } if ((hour()>=16) && (hour()<=20 )){ if (distance>=20){ Serial.println(distance); for(pos = 130; pos>=1; pos-=1) { myservo.write(pos); delay (20); } for(pos = 50; pos < 180; pos += 1) { myservo.write(pos); delay(20); } } delay(10000); } } } } } int getID() { if ( ! mfrc522.PICC_IsNewCardPresent()) { return 0; } if ( ! mfrc522.PICC_ReadCardSerial()) { return 0; } Serial.println(F("Scanned PICC's UID:")); for (int i = 0; i < 4; i++) { // readCard[i] = mfrc522.uid.uidByte[i]; Serial.print(readCard[i], HEX); } Serial.println(""); mfrc522.PICC_HaltA(); return 1; } void readID( int number ) { int start = (number * 4 ) + 2; for ( int i = 0; i < 4; i++ ) { storedCard[i] = EEPROM.read(start + i); } } boolean checkTwo ( byte a[], byte b[] ) { if ( a[0] != NULL ) match = true; for ( int k = 0; k < 4; k++ ) { if ( a[k] != b[k] ) match = false; } if ( match ) { return true; } else { return false; } } int findIDSLOT( byte find[] ) { int count = EEPROM.read(0); for ( int i = 1; i <= count; i++ ) { readID(i); if ( checkTwo( find, storedCard ) ) { return i; break; } } } boolean findID( byte find[] ) { int count = EEPROM.read(0); for ( int i = 1; i <= count; i++ ) { readID(i); if ( checkTwo( find, storedCard ) ) { return true; break; } else { } } return false; } boolean isMaster( byte test[] ) { if ( checkTwo( test, masterCard ) ) return true; else return false; } |
這就是本項目的第一部分。這個裝置凝聚了我對電子裝置以及軟體程式設計的熱情,也讓我免於在一天之內餵好幾次寵物。它完美地在一個簡易項目和一個實用的家庭發明之間作出了平衡。在接下來的部分,我們將探究更先進的使用者介面,那時你就可以遠端控制餵食器了。