


Arduino探索漫遊車3—程式設計

結論
像往常一樣,我們呈現一些試駕的照片!



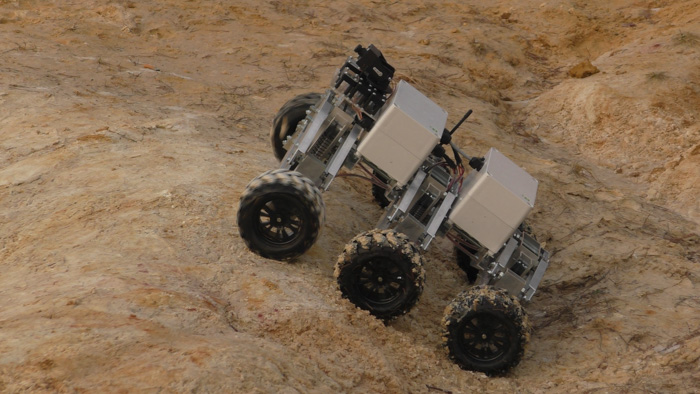


顯然,在許多地方仍然有很大的改進空間。比如說,測試機器人的時候,我注意到抑制器會有向下垂的趨勢。
圖11:機器人行動時的懸架細節可以注意到車身前部離地面較近
儘管這不是一個很大的問題,但它表明出抑制器內部的彈簧設定得有點松。彈簧設定更緊一些,機器人的車體就會更高一些,這樣在崎嶇地形中被困住的可能性會更小。
另一個可以改進的是應用程式。顯然,其中某些部分現在只是個預留位置而已:GPS和佈局選項不包含任何內容,所以如果能夠實現這些功能就更好了。不幸的是,在編寫程式的時候,我還沒想到該怎麼做,所以我可能還需要更多的Android Studio經驗才能找到方法。
最後,感測器和相機的位置佈局也是可以改善的部分。雖然通常的習慣是將相機放在機器人的前方,但是這樣還是有些暴露。可能透過使用某種杆來放在中間會更好一些,就像你在所有火星探測器上看到的那樣。既然說到這裡,添加一些太陽能電池板並將整個裝置用於某些太空任務可能也是個不錯的注意!如果您有幾億美元的閒置資金並且願意用來資助這項驚人的太空冒險計畫,就跟我聯繫吧!
言歸正傳,非常感謝您閱讀這篇文章以及對整個系列的關注。如果您對機器人有任何想法請在下面討論區留言!如果您決定要親自構建屬於您自己的ArduRover,請記得與全世界分享您的成果!
Jan Gromes
Jan目前就讀於布爾諾理工大學電氣工程專業,擁有多年Arduino和其他微控制器專案經驗,尤其對於機器人系統的機械設計感興趣。