


Arduino六足機器人第二部分-程式設計

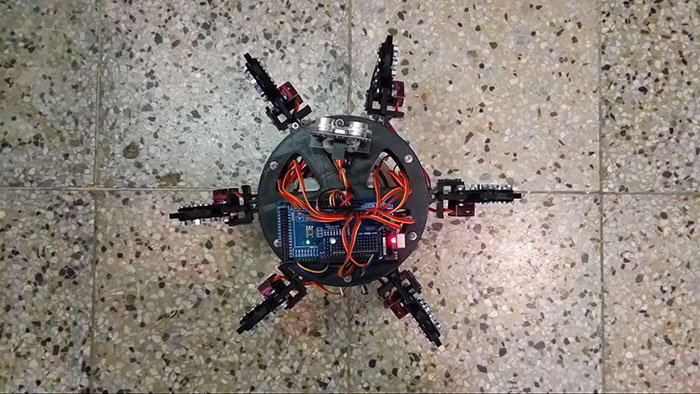
1. 首先,支腿0和3向前行動
圖9:行走步驟1(支腿0和3)
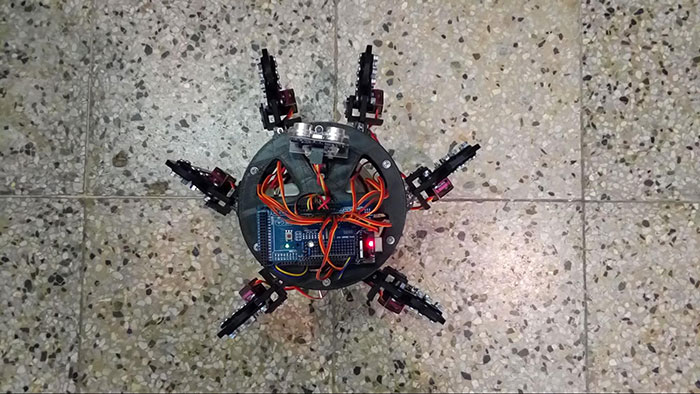
2. 然後,支腿2和5向相同方向行動
圖10:行走步驟2(支腿2和5)
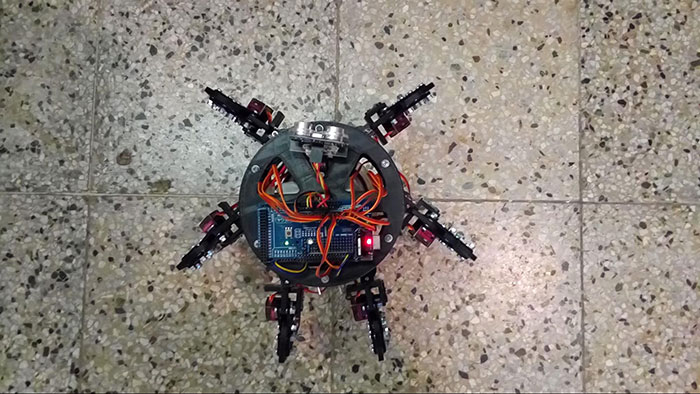
3. 對支腿1和4進行相同操作
圖11:行走步驟4(支腿1和4)
4. 現在,身體行動向前,開始重複執行整個過程。
圖12:行走步驟4
您可以在以下視訊中觀看整個運動:
Jan Gromes
Jan目前就讀於布爾諾理工大學電氣工程專業,擁有多年Arduino和其他微控制器專案經驗,尤其對於機器人系統的機械設計感興趣。