
仿昆蟲式MEMS微型機器人

©Saiko 等, 2012
一種昆蟲式微型機器人已經問世。這款受昆蟲啟發的微型機器人重量不到0.080g,尺寸小於5.0mm,有六條腿,可以模仿螞蟻的爬行動作。Saito博士和他在日本大學的同事一直在積極尋求方法來積體人工神經網路,以產生平穩的、與昆蟲類似的運動(轉換)行為。
在深入研究細節之前,我們首先來解釋一下仿生技術是什麼。
什麼是仿生?
“仿生一詞,是由Otto H Schmitt(Schmitt 1969)提出的,意思是對自然界的方法、機制和過程的學習和模仿。大自然的能力在許多方面都遠勝於人類,對其中的許多特長和特性進行改編可以為我們的科技帶來巨大提升。” – Bar-Cohen, 2006。
仿生領域為未來的科技發展提供了巨大的潛力。在這項研究中,就是從昆蟲的生物物理機制中汲取了靈感,從而在微觀尺度上研發了一種微型機器人:一隻特別的螞蟻。研究人員使用類比積體電路(IC)構造了人工神經網路,可以產生“驅動波形”或脈衝來驅動微型機器人的運動。
為了使所有機器人能夠真正實現行走、爬行、搖晃甚至跳躍,致動器是必不可少的。致動器是使機器人能夠執行動作的實際機制,類似於生物體中肌肉的功能。這種類似螞蟻的微型機器人使用的是帶有嵌入式形狀記憶合金的旋轉致動器。致動器和人工神經網路都是由矽晶片經微電腦電系統(MEMS)微加工技術製造而成。

圖1:MEMS微型機器人的微電腦械系統;(a)分解圖;(b)微型機器人組裝圖/© Saito等,2016
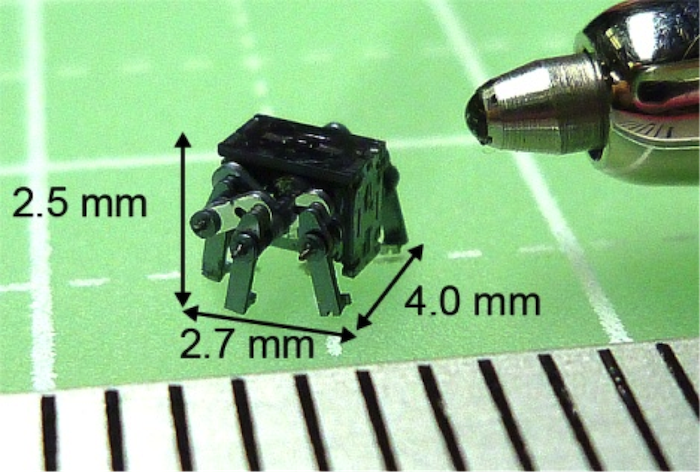
如圖1所示,連杆機構由3個支腳、軸和連杆銷組成。由於中部支腳固定在轉子上,中部支腳和轉子的旋轉相位相同。前端支腳和後部支腳透過連杆銷與中部支腳固定,這樣可以進行90°相位移。微型機器人的尺寸為4.0 x 2.7 x 2.5mm,並與八根訊號線與兩個GND線連接(圖1b)。當訊號線連接人工神經網路時,這個微型機器人就可以實現爬行了。
這種MEMS機器人的特殊之處在於它實現了由硬體模型而非軟體模型來構建大型人工神經網路。據研究人員稱,鑒於電腦性能(例如處理速度和存儲容量)的限制,大規模的數學(軟體)神經元建模非常困難。另一方面,硬體神經元建模實現了高速條件下的神經網路連續處理和非線性操作。硬體模型與IC技術的聯合使用有助於減小電路的尺寸。因此,對於微米級和毫米級的項目,這非常有用。正是出於這種原因,他們最終選擇了硬體神經元模型。
為什麼神經網路如此重要?為什麼研究人員要如此努力地把這個系統積體到微型機器人中?神經網路很重要,因為它是控制系統擁有“適應性能”的根本。換句話說,神經網路使機器人能夠在給定情況下對某些事件作出響應和反應,因此它的動作並不是無意識產生的。在某些時候,機器人會進行學習行為,之後可以根據收集到的資訊作出決策。
這種微型機器人透過充分利用脈衝型硬體神經元模型可以實現像螞蟻一樣爬行。脈衝型硬體神經元模型是II類神經元模型,具有一些與實際生物神經元相同的特長,例如閾值、不應期和時空總和。另外,該模型可以產生連續的動作電位。
硬體神經元模型輸出“驅動脈衝”,這些脈衝操作機器人的人工肌肉線。有趣的是,機器人控制是透過連續的脈衝波實現的,類似於傳遞給生物神經元的脈衝,而無需任何軟體程式或A/D轉換器。

圖2:硬體神經元模型的輸出波形範例/© Saito 等, 2012
如圖2所示,硬體神經元模型可以輸出向前運動和向後運動的波形。波形的輸出訊號連接到由銅線製成的人工肌肉線上。

圖3:組裝好的MEMS微型機器人/© Saito等, 2016
在微電腦械系統(底部)的上方是人工神經網路微電子系統(頂部)的裸晶片IC,重量為0.02g。裸晶片IC固定在阻燃劑4(FR-4)上。MEMS微型機器人的運動速度為4毫米/分鐘。如果頂部沒有帶有FR-4上的裸晶片IC,速度可以達到26.4毫米/分鐘。這裡需要注意的一件事是電流鏡像電路。形狀記憶合金致動器需要電流來產生旋轉運動。因此,電壓波形必須轉換為電流波形。

圖4:MEMS微型機器人的行動/© Saito等, 2016
從視訊中可以看出,這種仿昆蟲MEMS微型機器人的運動行為類似於螞蟻。不要為它的速度之慢感到太驚訝!研究人員解釋說,形狀記憶合金的熱量傳導至MEMS微型機器人的機械零件,導致了機器人速度很慢。在他們後續發佈的作品中介紹了一種新型的旋轉致動器,可以產生速度更快的連續旋轉運動。
如果您有任何意見或疑問,請在Google +上給我們留言,以及關注我們的動態。在下一篇文章中我們將探討具有兩種致動器的微型化六足MEMS機器人:形狀記憶合金(SMA)致動器和壓電(PZT)致動器。