關於我們
與我們聯繫
简体中文
English
日本語
By
By ROHM
ARDUINO/RASPBERRY PI PROJECTS & MORE.
Menu
探索去
找靈感
–
採訪/新聞/活動/其他
動手做
–
機器人/IoT/AI/Raspberry Pi初學者指南/Arduino初學者指南
新技術
–
大學實驗室/學生組織/其他
找靈感
–
動手做
–
新技術
–
2024.03.13
Published by
吉田 顯一
其他微控制器開發板
Categories
其他微控制器開發板
用Arduino相容設備(M5Stack)和感測器製作迷你遙控車!(劇終篇)
實現M5Stack與智慧手機聯動控制 […]
2024.03.13
Published by
吉田 顯一
其他微控制器開發板
Categories
其他微控制器開發板
用Arduino相容設備(M5Stack)和感測器製作迷你遙控車!(第三部分)
透過M5Stack使用感測器實現自動駕駛和自動避讓功 […]
2024.03.13
Published by
吉田 顯一
其他微控制器開發板
Categories
其他微控制器開發板
用Arduino相容設備(M5Stack)和感測器製作迷你遙控車!(第二部分)
透過M5Stack使用馬達驅動器 第1 […]
2024.03.13
Published by
吉田 顯一
其他微控制器開發板
Categories
其他微控制器開發板
用Arduino相容設備(M5Stack)和感測器製作迷你遙控車!(第一部分)
用小型Arduino相容設備(M5Stack)享受電 […]
2024.02.21
Published by
吉田 顯一
Arduino初學者指南
Categories
Arduino初學者指南
用Raspberry Pi和SensorMedal製作IoT跳繩設備 第四部分(最終篇):在設備上安裝顯示器以增加動力!
第一部分:用跳繩測試儀解決運動不足問題! 第二部分: […]
2024.02.21
Published by
吉田 顯一
Arduino初學者指南
Categories
Arduino初學者指南
用Raspberry Pi和SensorMedal製作IoT跳繩設備 第三部分:連接Google Drive,保存並查看跳繩結果
第一部分:用跳繩測試儀解決運動不足問題! 第二部分: […]
2024.02.21
Published by
吉田 顯一
Arduino初學者指南
Categories
Arduino初學者指南
用Raspberry Pi和SensorMedal製作IoT跳繩設備 第二部分:用SensorMedal檢測跳躍次數並在顯示器上顯示
第一部分:用跳繩測試儀解決運動不足問題! […]
2024.02.21
Published by
吉田 顯一
Arduino初學者指南
Categories
Arduino初學者指南
用Raspberry Pi和SensorMedal製作IoT跳繩設備 第一部分:用跳繩測試儀解決運動不足問題!
大家好,我是吉田! 隨著在室內度過的時間越來越多,我 […]
2024.01.17
Published by
吉田 顯一
Raspberry Pi初學者指南
Categories
Raspberry Pi初學者指南
一款用Raspberry Pi和感測器製作的可穿戴式小型健康管理設備!第四部分•劇終篇
第1部分: 用Raspberry Pi Zero和羅 […]
2024.01.17
Published by
吉田 顯一
Raspberry Pi初學者指南
Categories
Raspberry Pi初學者指南
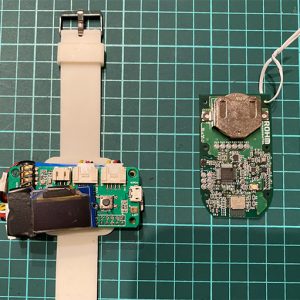
一款用Raspberry Pi和感測器製作的可穿戴式小型健康管理設備!第三部分
第1部分: 用Raspberry Pi Zero和羅 […]
2024.01.17
Published by
吉田 顯一
Raspberry Pi初學者指南
Categories
Raspberry Pi初學者指南
一款用Raspberry Pi和感測器製作的可穿戴式小型健康管理設備!第二部分
第1部分:一款用Raspberry Pi和感測器製作 […]
2024.01.17
Published by
吉田 顯一
Raspberry Pi初學者指南
Categories
Raspberry Pi初學者指南
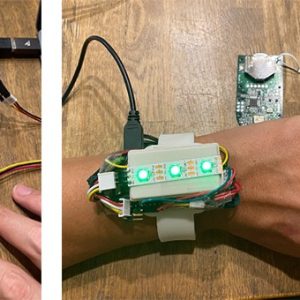
一款用Raspberry Pi和感測器製作的可穿戴式小型健康管理設備!第一部分
用Raspberry Pi Zero和羅姆Senso […]
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
Next page